自動控制系統的設計--PID校正

 |
|
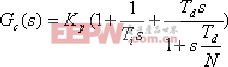
式中N一般大于10。顯然,當N→∞時,上式即為理想的PID控制器。
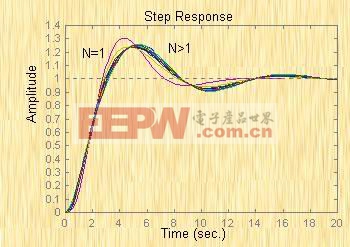 |
圖6-30 |
為考察PID控制器中微分環節的作用,可通過下面的Matlab程序對上例進行說明。令Kp、Td和Ti固定,N變化,研究近似微分對系統性能的影響。從圖6-30可以發現,當N>10時,近似精度相當滿意。
綜合前面所述,PID控制器是一種有源的遲后-超前校正裝置,且在實際控制系統中有著最廣泛的應用。當系統模型已知時,可采用遲后-超前校正的設計方法。若系統模塊未知或不準確,則可后述方法進行設計。
Function PID
N=[100,1000,10000,1:10];
G=tf(1,[1,3,3,1]);
Kp=1;Ti=1;Td=1;
Gc=tf(Kp*[Ti*Td,Ti,1]/Ti,[1,0]);
G_c=feedback(G*Gc,1);step(G_c), hold on
for i=1:length(N)
mn=Kp*([Ti*Td,0,0]+conv([Ti,1],[Td/N(i),1]))/Ti













評論