自動控制系統(tǒng)的設計--PID校正

,其控制器: ![]()
(3) 系統(tǒng)閉環(huán)傳遞函數(shù)及其階躍響應如下:
 |
1.8947
G_c1(s)= ----------------------------------------------
(s^2 + 0.7215s + 3.457) (s^2 + 9.279s + 24.85)
55.7053 (s+0.4386)
G_c2(s)= --------------------------------------------------------
(s+0.3735) (s^2 + 0.5561s + 2.773) (s^2 + 9.07s + 23.59)
68.4 (s+1.316)^2
G_c3(s)=------------------------------------------------------
(s+6.827) (s^2 + 2.6s + 1.711) (s^2 + 0.5727s + 10.14)
從上圖可以發(fā)現(xiàn),單純采用比例校正,系統(tǒng)存在靜態(tài)誤差;采用PID比采用PI校正響應速度快,但存在較大的超調量,為此可改用修正的PID控制器。本例程序清單如下:
function zn4 %demonstrate with time PID method 1
g=tf(10,conv([1,1],conv([1,2],conv([1,3],[1,4]))));
step(g); k=dcgain(g);
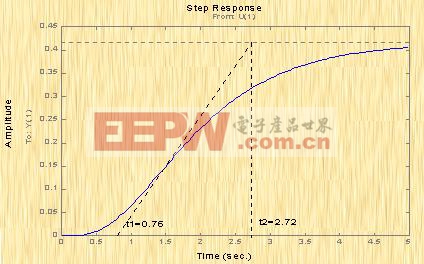
L=0.76;T=1.96;
alpha=k*L/T;
Kp=1/alpha;
gc1=tf(Kp,1)
g_c1=feedback(gc1*g,1);
zpk(g_c1)
step(g_c1); hold on
Kp=0.9/alpha;Ti=3*L;
gc2=tf(Kp*[1,1/Ti],[1,0])
g_c2=feedback(gc2*g,1);
zpk(g_c2)
step(g_c2)
Kp=1.2/alpha;Ti=2*L;Td=L/2;
gc3=tf(Kp*[Ti*Td,Ti,1]/Ti,[1,0])
g_c3=feedback(gc3*g,1);
zpk(g_c3)
step(g_c3)
例6-11 有一系統(tǒng)的開環(huán)傳遞函數(shù)為:













評論