自動控制系統的設計--PID校正

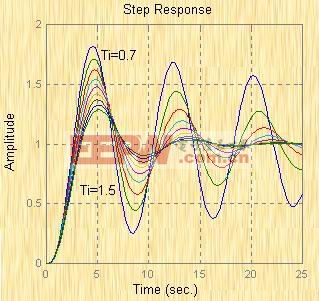 |
| 圖6-29 |
對于比例調節器中的示例,利用如下的Matlab程序,可得到圖6-29的結果,顯然,采用PI控制,系統的穩態誤差為零;且當Ti的減少時,系統的穩定性變差;當Ti增加時,系統的響應速度變慢。
Function PI
G=tf(1,[1,3,3,1]);
Kp=1;Ti=[0.7:0.1:1.5];
for i=1:length(Ti)
Gc=tf(Kp*[1,1/Ti(i)],[1,0]); G_c=feedback(G*Gc,1);
step(G_c),hold on
end
axis([0,20,0,2])
(三)PD和PID調節器—微分的作用
當PID調節器的 時,校正裝置成為一個PD調節器,這相當于一個超前校正裝置,對系統的響應速度的改善是有幫助的。但在實際的控制系統中,單純采用PD控制的系統較少,其原因有兩方面,一是純微分環節在實際中無













評論