自動控制系統的設計--PID校正

解:由于系統開環中存在積分環節,無法采用第一法。因而采用Zieloger-Niclosls整定公式第二法。
(1) 首先,令![]() ,則閉環系統的傳遞函數為:
,則閉環系統的傳遞函數為:

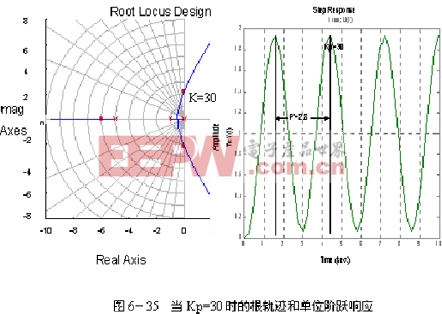
通過Ruth判據容易得到當![]() 時,閉環系統產生持續等幅振蕩。使用Matlab中rltool命令,并增加極點:
時,閉環系統產生持續等幅振蕩。使用Matlab中rltool命令,并增加極點: ![]() 在根軌跡與虛軸交界處點擊可得到同樣結果。如圖6-35。
在根軌跡與虛軸交界處點擊可得到同樣結果。如圖6-35。
 |
(2) 根據Z-N第二整定法,即可分別得到PI和PID控制器的參數:
(A)PI控制器:![]() 。
。
![]()
(B) PID控制器:
![]()
解:由于系統開環中存在積分環節,無法采用第一法。因而采用Zieloger-Niclosls整定公式第二法。
(1) 首先,令![]() ,則閉環系統的傳遞函數為:
,則閉環系統的傳遞函數為:
通過Ruth判據容易得到當![]() 時,閉環系統產生持續等幅振蕩。使用Matlab中rltool命令,并增加極點:
時,閉環系統產生持續等幅振蕩。使用Matlab中rltool命令,并增加極點: ![]() 在根軌跡與虛軸交界處點擊可得到同樣結果。如圖6-35。
在根軌跡與虛軸交界處點擊可得到同樣結果。如圖6-35。
|
(2) 根據Z-N第二整定法,即可分別得到PI和PID控制器的參數:
(A)PI控制器:![]() 。
。
![]()
(B) PID控制器:
![]()













評論