自動控制系統的設計--PID校正

以一個三階系統為例。
一單位反饋系統的開環傳遞函數為:![]() ,其根軌跡如圖6—27,當
,其根軌跡如圖6—27,當 ![]() 時,系統將產生振蕩。同時從圖6—28閉環響應曲線也可以發現,當
時,系統將產生振蕩。同時從圖6—28閉環響應曲線也可以發現,當 ![]() 增大時,系統穩態輸出增大,系統響應速度和超調量也增大,
增大時,系統穩態輸出增大,系統響應速度和超調量也增大, ![]() 時,系統產生等幅振蕩,已不穩定。可見,單純采用
時,系統產生等幅振蕩,已不穩定。可見,單純采用 ![]() 來改善系統的性能指標是不合適的。
來改善系統的性能指標是不合適的。
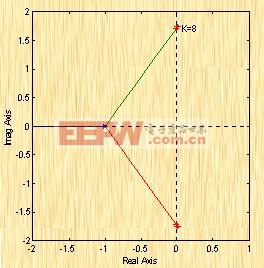 |
| 圖6-27 |
相關推薦技術專區 |
以一個三階系統為例。
一單位反饋系統的開環傳遞函數為:![]() ,其根軌跡如圖6—27,當
,其根軌跡如圖6—27,當 ![]() 時,系統將產生振蕩。同時從圖6—28閉環響應曲線也可以發現,當
時,系統將產生振蕩。同時從圖6—28閉環響應曲線也可以發現,當 ![]() 增大時,系統穩態輸出增大,系統響應速度和超調量也增大,
增大時,系統穩態輸出增大,系統響應速度和超調量也增大, ![]() 時,系統產生等幅振蕩,已不穩定。可見,單純采用
時,系統產生等幅振蕩,已不穩定。可見,單純采用 ![]() 來改善系統的性能指標是不合適的。
來改善系統的性能指標是不合適的。
|
| 圖6-27 |
相關推薦技術專區 |













評論