自動控制系統的設計--基于頻率法的串聯校正設計

(4)取![]() ,則
,則 ![]() 。這樣,遲后校正網絡的傳遞函數為:
。這樣,遲后校正網絡的傳遞函數為:![]()
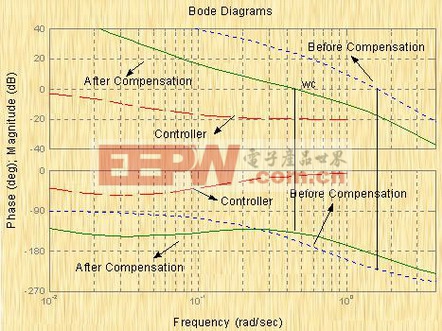
(5)校正后系統的開環傳遞函數為
![]()
對應的伯德圖如圖6—16中的實線所示。由圖或由Matlab中的margin函數可知,校正后系統的相位裕量約為![]() ,增益裕量約等于14dB,滿足設計要求。
,增益裕量約等于14dB,滿足設計要求。
 |
6.3.3 遲后-超前校正
如果未校正系統為不穩定,或對校正后系統的動態和靜態性能均有較高的要求時,只采用上述的超前校正或遲后校正,難于達到預
(4)取![]() ,則
,則 ![]() 。這樣,遲后校正網絡的傳遞函數為:
。這樣,遲后校正網絡的傳遞函數為:![]()
(5)校正后系統的開環傳遞函數為
![]()
對應的伯德圖如圖6—16中的實線所示。由圖或由Matlab中的margin函數可知,校正后系統的相位裕量約為![]() ,增益裕量約等于14dB,滿足設計要求。
,增益裕量約等于14dB,滿足設計要求。
|
6.3.3 遲后-超前校正
如果未校正系統為不穩定,或對校正后系統的動態和靜態性能均有較高的要求時,只采用上述的超前校正或遲后校正,難于達到預












評論