基于PLC的攤鋪機行走控制系統糾偏算法研究

4 現場測試
4.1 現場測試
將此糾偏控制算法應用于新筑公司MT12000型攤鋪機的行走系統控制中,將發動機轉速設定為2200r/min進行控制效果測試。本文引用地址:http://www.104case.com/article/160998.htm

測試方法:每項測試距離為履帶長度的2-5倍(即17米-42.5米),發動機工作在額定轉速,在攤鋪機兩側的機架及相鄰履帶設定試驗的起始基準,啟動發動機,轉向控制器置于零位,使攤鋪機按某一作業速度向前直線行駛,到達終點后停機,分別測量左右距離差的絕對值,來計算相對的跑偏量。
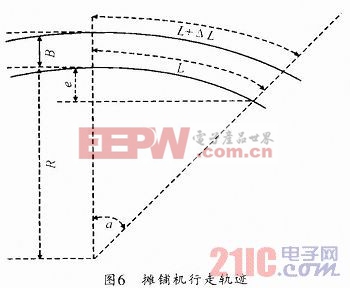
攤鋪機試驗過程軌跡圖如圖6:

不采用糾偏算法在不同的速度設定值下得到的結果如表7。
從以上表6、表7的對比測試結果可以看出,利用此糾偏控制算法使MT12000型攤鋪機的直線度跑偏量控制在0.4%以內,大大提高了攤鋪機的行駛直線度性能,改善了攤鋪機的整體控制效果。
5 結束語
瀝青混凝土攤鋪機行駛系統的直線度性能的提升是改善路面施工質量的重要途徑之一,單純依靠模糊PID控制可以提高機器的行駛恒速性能,但難以保證左右履帶行程的一致性,從而無法確保機器的行駛直線度。本文探討了在模糊PID控制的基礎上加上左右里程關聯的方法,并將其應用在攤鋪機的行駛系統控制中,用以提高攤鋪機的直線行駛效果。對比測試結果表明,用此糾偏控制算法獲取的直線行走效果在原有控制效果的基礎上提高了0.5%左右,在很大程度上提升了攤鋪機的直線行駛性能。

pid控制器相關文章:pid控制器原理











評論