- 為何人形機器人難以維持直立行走姿態?在科技飛速發展的今天,人形機器人已逐漸融入我們的生活。無論是家庭服務、工業制造,還是娛樂表演,它們都發揮著不可或缺的作用。但你是否曾困惑:為何這些外觀高度仿人的機器人,在行走時卻難以保持穩定的直立姿態呢?首先,我們來深入了解人形機器人的結構和運動特性。人形機器人,主要由頭部、軀干、四肢及關節構成,依賴電機和減速器實現動作。在行走時,它們需通過關節的旋轉來維持平衡。然而,這一過程并不總是那么順暢。1. 機械結構與驅動系統人形機器人直立行走的基礎是仿生機械結構,通常由以下部
- 關鍵字:
人形機器人 電機控制 行走

- 引言
深海作業機器人是一種在水深5000~6000米的海底沉積物上行走、采集錳結核的智能履帶車輛,兩條履帶由安裝在后輪上的兩臺液壓馬達分別驅動,用變量泵調節速度。我國采礦區位于太平洋中部,為典型的深海平原,
- 關鍵字:
控制 防滑 行走 機器人 海底
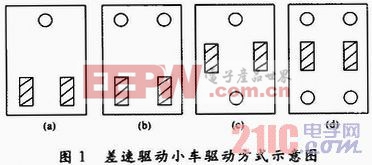
- 摘要:為了讓電磁屏蔽效能自動測試裝置能夠在屏蔽室中按照已給定的路徑運動,設計了一種開環控制的兩輪差速驅動小車,對其運動學進行了分析,并采用雙圓弧擬合曲線方法使小車實現按照給定曲線行走。通過大量運動實驗
- 關鍵字:
方法 行走 曲線 小車 驅動
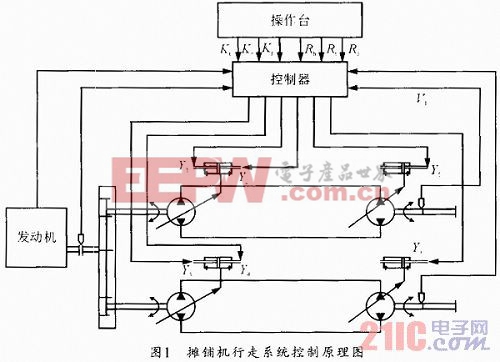
- 摘要:對瀝青混凝土履帶式攤鋪機行駛系統糾偏控制進行了研究,提出了在模糊PID控制攤鋪機恒速性能的基礎上引入左右履帶里程關聯的方法來解決攤鋪機行走過程中跑偏的問題通過現場試驗,證明了模糊PID加左右履帶里程關
- 關鍵字:
糾偏 算法 研究 控制系統 行走 PLC 攤鋪機 基于
行走介紹
您好,目前還沒有人創建詞條行走!
歡迎您創建該詞條,闡述對行走的理解,并與今后在此搜索行走的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473