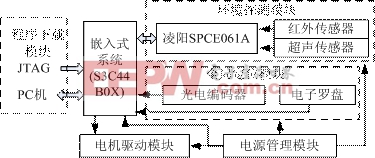
基于S3C44B0X的移動機器人的應用研究移動機器人利用導航技術,獲得機器人的目前所處的位置,結合傳感器技術對周圍外界環境(障礙物等)作實時探測,并根據環境提供的信息規劃一條可行路徑完成達到目標點的任務。移動
關鍵字:
應用 研究 機器人 移動 S3C44B0X 基于
Author(s):
關鍵字:
LabVIEW 機器人
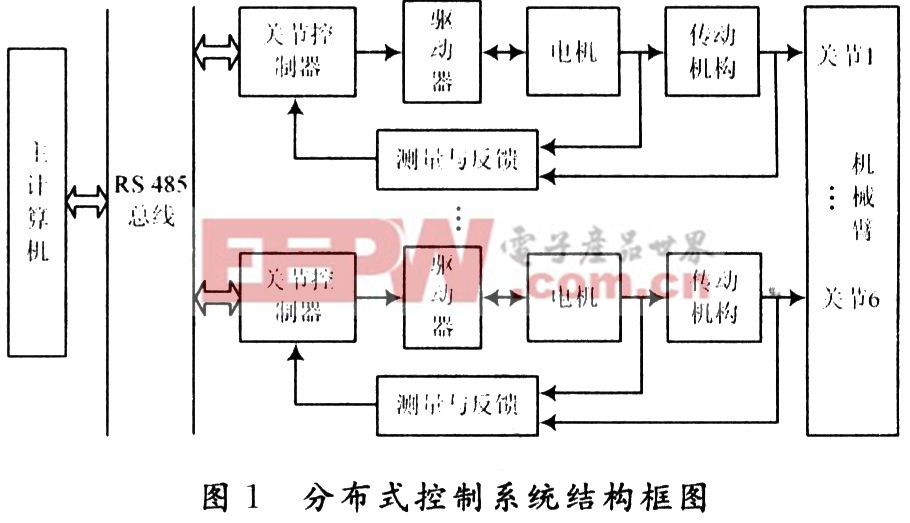
在具有32自由度仿人機器人中,為了每一個關節動作準確,可以采用分布式控制的體系結構。這里采用基于RS 485總線的TMS320F240DSP作為分布式關節控制器,非常適合于在機械臂內的狹小空間內安裝,并進行增量碼盤和速度檢測電路的設計以及相應的軟件設計等,完成了6個自由度機械臂分布式關節控制器設計,能夠滿足仿人機器人技術與系統的運動軌跡的要求。
關鍵字:
控制器 設計 關節 機器人 DSP 基于
過去,機器人制造是一個非常困難、容易出錯且耗時的過程,因為采用由分立元件構成的裝置實現對環境的感應,而這些裝置中很多部件都不能有效地協同工作,處理器缺乏足夠的能力從多個傳感器收集信息并處理這些信息。
關鍵字:
設計制造 過程 機器人 簡化 傳感 技術 先進 傳感
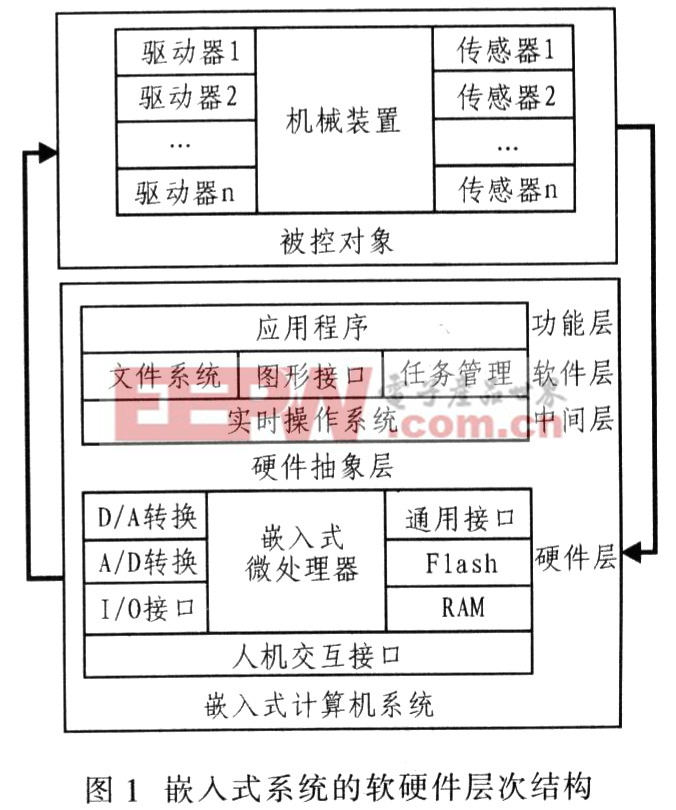
基于ARM9的嵌入式仿人機器人傳感器系統設計,0 引 言
關鍵字:
系統 設計 傳感器 機器人 ARM9 嵌入式 基于 ARM9
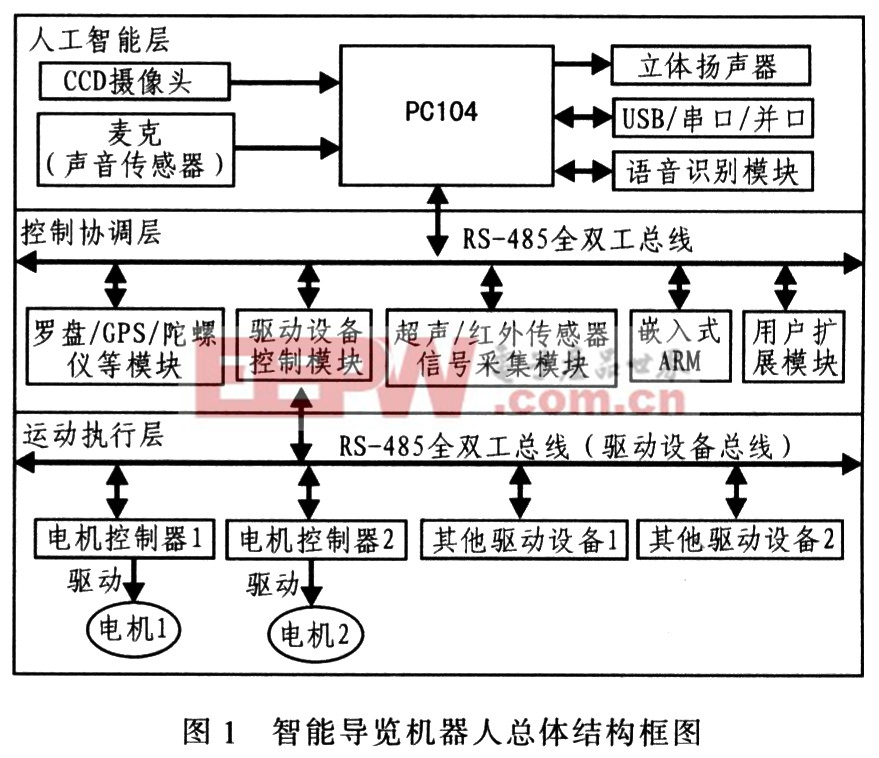
1 引言
關鍵字:
機器人 控制系統 設計 導覽 智能 機器 視覺 基于
基于ARM的嵌入式服務機器人控制器的研究,1 引言
關鍵字:
控制器 研究 機器人 服務 ARM 嵌入式 基于 ARM
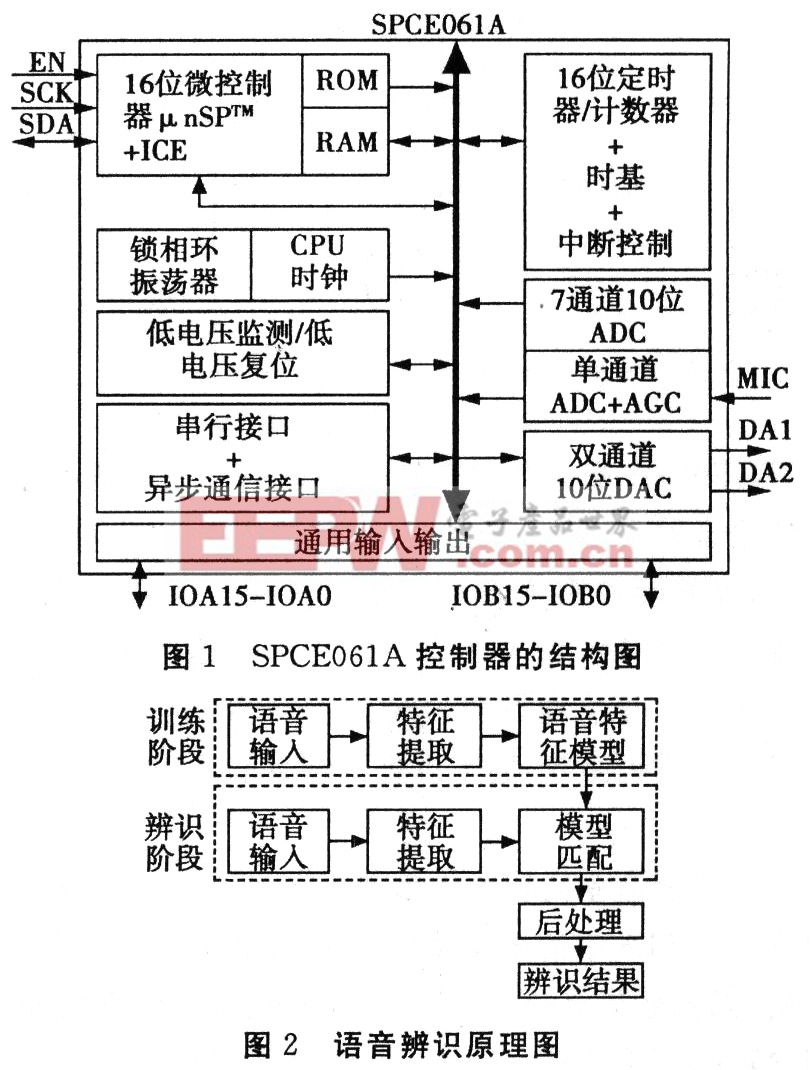
0 引言
關鍵字:
辨識 系統 研究 語音 機器人 SPCE061A 智能 小車 基于
今年的CEATEC較去年冷清許多,雖然仍用掉八個展覽廳,但整個走道比去年寬敞多了 – 因為參展廠商少了。不過,日本的重量級廠商仍然沒有缺席,展示的主題仍圍繞著手機、TV、通訊和創新設備,以及背后的核心組件技術和延伸而來的各種應用
關鍵字:
CEATEC 手機 機器人 太陽能 電子紙 Sharp KDDI
提出了一種以CAN總線為通信工具,DSP芯片為控制器的主處理器和雙位置傳感器的反饋結構,其配合主控計算機和底層控制器雙層反饋的控制方式,可適于仿人步行機器人的分布式運動控制系統.整個控制系統結構靈活、功能強大、工作穩定可靠,可以顯著提高仿人機器人的運動性能.
關鍵字:
運動 控制系統 研究 機器人 傳感器 CAN 總線 基于 CAN
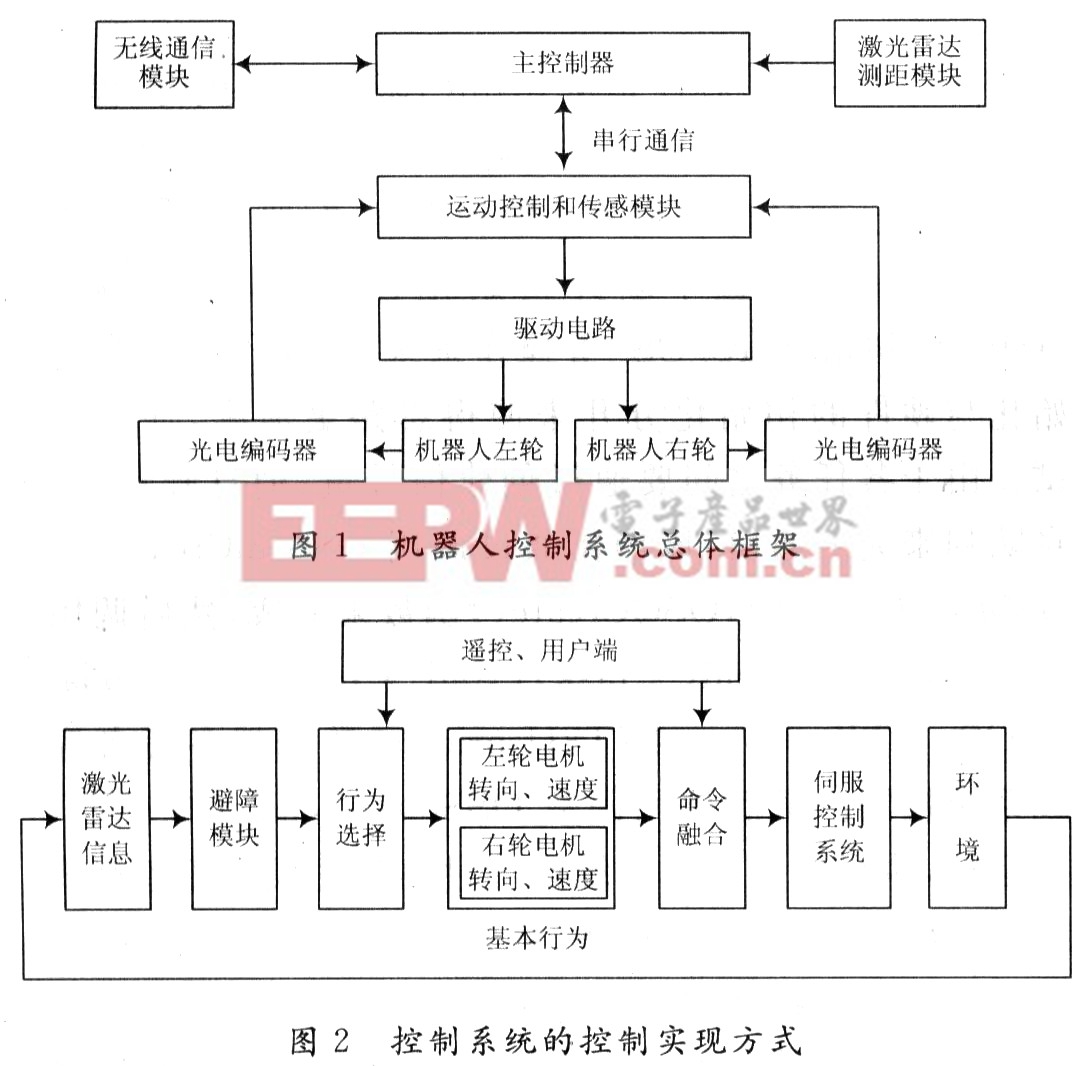
根據激光雷達跟蹤測量定位理論,介紹一種基于μC/OS-Ⅱ的實時機器人控制系統。該控制系統采用分層分布式控制系統設計方案,主控制模塊以S3C44BO為硬件平臺,并以μC/OS-Ⅱ為軟件平臺,通過多任務劃分,將整個系統功能分成多個按不同優先級的調度任務,以實現機器人不同功能的需求。伺服控制模塊以TMS320F2812為控制器,并以PID為控制決策算法。性能測試表明,該控制系統控制精度高,穩定性好,系統響應迅速。
關鍵字:
控制系統 設計 機器人 雷達 激光 基于 轉換器
本文所設計實驗,已經考慮較苛刻的時間及環境閃素,能說明整個系統具有良好的實時性。該實時控制方案的可行,有效降低了雙臂單腿跳躍機器人控制系統的開發難度和成本,是關鍵的階段性成果。
關鍵字:
控制 技術 研究 實時 機器人 單腿 跳躍 雙臂 CAN
機器人介紹
機器人目錄
機器人概述篇
機器人的組成
機器人發展史
機器人分類篇
機器人品種篇
人類與機器人
電影——《我,機器人》
北京奧運會曾經使用過的機器人
機器人學國家重點實驗室
機器人
日本最新機器人
美國戰斗機械狗研制成功 網上引發轟動
搜索引擎術語
艾西莫夫機器人三定律 機器人概述篇
機器人的組成
機器人發展史
機器人分類篇
機器人品種篇
人類與機器人
電影 [
查看詳細 ]
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473