基于S3C44B0X的移動機器人的應用研究

移動機器人利用導航技術,獲得機器人的目前所處的位置,結合傳感器技術對周圍外界環境(障礙物等)作實時探測,并根據環境提供的信息規劃一條可行路徑完成達到目標點的任務。移動機器人技術涉及到傳感器技術,導航技術,計算機技術,人工智能等多個領域,因而對移動機器人的控制部分提出很高的要求,特別是視覺傳感器的出現,要求控制系統不僅存儲量大,而且處理速度快等。以往基于PLC和單片機控制的移動機器人就不能很好的滿足實時性快速性的特點。
本文引用地址:http://www.104case.com/article/163449.htm隨著ARM處理器的出現和發展以及嵌入式系統的發展,移動機器人的實時性快速性要求便能得到很好滿足,現在該技術已經在多種領域得到有效的應用。本文是以SAMSUNG公司一款基于ARM7TDMI核的低功耗高性能的32位處理器芯片S3C44B0X為控制核心,以凌陽16位單片機SPCE061A為輔助處理器來處理傳感器探測的障礙物信息,并運用嵌入式實時多任務操作系統µC/OS-II管理移動機器人的導航算法的實現和多任務的執行。實驗結果表明:該系統能夠實現避障和導航功能并能順利達到目的地。
2 控制系統的硬件設計
移動機器人的控制系統主要完成對外界障礙物的探測與信息的傳輸,機器人當前位置的獲取,路徑規劃,和運行控制等功能。對系統進行功能模塊化劃分,本系統可劃分以下五大模塊:環境探測模塊;全局定位模塊;程序下載模塊,電機驅動模塊和電源管理模塊。各個模塊之間的關系如圖1所示。
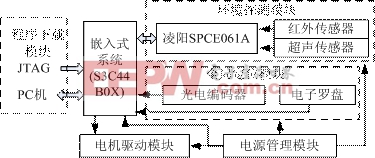
圖1 控制系統硬件系統圖
2.1 環境探測模塊
移動機器人在避障和路徑規劃過程中,機器人必須實時探測周圍的障礙物的信息,測量障礙物的距離。目前有紅外,超聲波,激光和視覺(CDD)傳感器,激光傳感器受環境影響大,價格比較昂貴,視覺傳感器(CCD)要求芯片的存儲容量大且要求處理速度快等特點,不易采用。基于這一點本文在移動機器人的前方,左方,右方各安裝一套紅外傳感器和超聲波傳感器以測量3個方向的障礙物的距離,多傳感器的使用可以避免了單一傳感器的測量存在的盲區。
紅外傳感器有發射器和接受器構成,此傳感器的3路發射端口接凌陽單片機SPCE061A的3路I/O口,3路接受器的端口接單片機的另外3路。當單片機I/O輸出為高電平時,發射器端口發射紅外光,光波遇到障礙物反射被接受器,產生光強相對的電流經過A/D轉換輸入單片機,根據電壓大小計算障礙物的距離。超聲波傳感器的工作原理與紅外傳感器基本相同,聲波遇到障礙物返回被接受器接受,根據時間差計算障礙物的距離。
該探測模塊可以測量0~2m距離內的障礙物,測量誤差小,采用16位凌陽單片機SPCE061A對障礙信息進行快速處理,一旦探測到障礙物便通過總線接口與S3C44B0X通訊并作數據傳輸。










評論