基于ARM的嵌入式服務(wù)機(jī)器人控制器的研究

1 引言
隨著人口老齡化進(jìn)程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務(wù)機(jī)器人控制系統(tǒng)設(shè)計(jì)。該服務(wù)機(jī)器人的控制系統(tǒng)是機(jī)器人的神經(jīng)中樞,因而其設(shè)計(jì)是機(jī)器人研究的核心。該控制系統(tǒng)通常以MCU、 DSP等為核心,采用上、下位機(jī)二級(jí)分布式結(jié)構(gòu)。其中上位機(jī)一般為PC機(jī),下位機(jī)為單片機(jī)或DSP等微控制器。但隨著移動(dòng)機(jī)器人的智能化,控制方法的發(fā)展,所需計(jì)算量增大,一般的單片機(jī)等處理器很難完成控制要求。而基于ARM的嵌入式服務(wù)機(jī)器人的控制器采用分層與模塊化結(jié)構(gòu),充分體現(xiàn)可擴(kuò)展性、可移植性的設(shè)計(jì)原則.同時(shí)具有低成本、低功耗、體積小巧、可靠性高、智能化高以及通用性等特點(diǎn)。
2 系統(tǒng)整體結(jié)構(gòu)設(shè)計(jì)
圖1為嵌入式控制系統(tǒng)的軟硬件層次結(jié)構(gòu)。
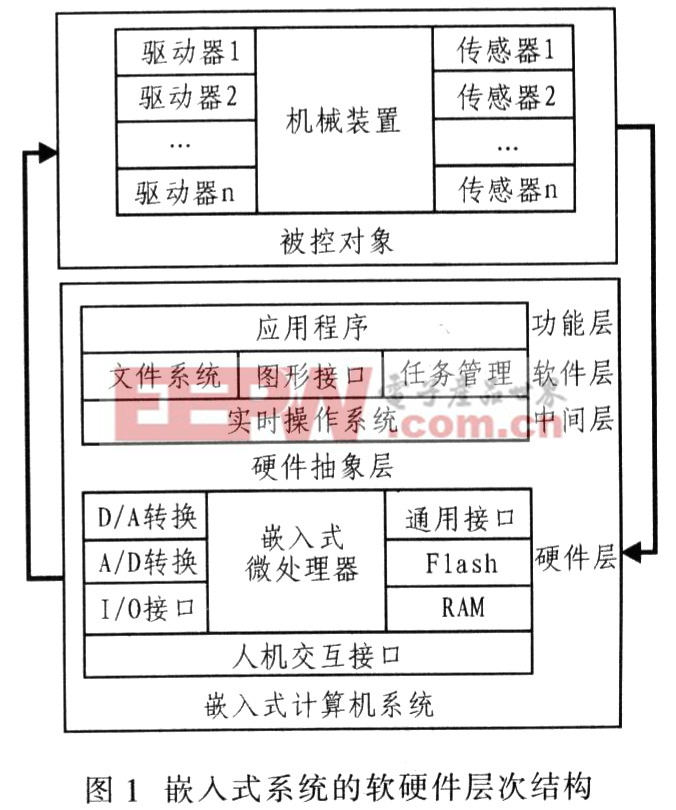
嵌入式系統(tǒng)是以應(yīng)用為中心,以計(jì)算機(jī)技術(shù)為基礎(chǔ),軟、硬件可剪裁,適用于應(yīng)用系統(tǒng),對(duì)功能、可靠性、成本、體積,功耗要求嚴(yán)格的專用計(jì)算機(jī)系統(tǒng)。嵌入式系統(tǒng)總體可劃分為硬件和軟件兩部分。硬件由微處理器和外圍的接口電路組成,同時(shí)還包括傳感器及驅(qū)動(dòng)器接口和被控對(duì)象(機(jī)械裝置);而軟件一般由實(shí)時(shí)操作系統(tǒng)及其運(yùn)行的應(yīng)用軟件構(gòu)成。其應(yīng)用軟件的功能層由基于RTOS的應(yīng)用程序組成,用來控制被控對(duì)象。
linux操作系統(tǒng)文章專題:linux操作系統(tǒng)詳解(linux不再難懂)





評(píng)論