基于LabVIEW構建智能的移動機器人及無人駕駛車
—— Leveraging LabVIEW Platform to Build Intelligent Mobile Robots and Unmanned Vehicles

引言
本文引用地址:http://www.104case.com/article/98860.htm移動機器人構成復雜、應用靈活,目前商業化程度還不高,相對處于前沿研究的階段,因此一直以來都是科學家和工程師們關注的重點。 移動機器人具有某些共同的構架和組成部分,是一個融合了眾多機電系統和子系統的綜合體系,并通過這些組成部分與子系統的有機結合協調工作,雖然部分子系統已有現成的軟硬件工具和解決方案,但如何快速地把各子系統集成在一起、進行早期的整體功能性驗證,就成了決定機器人設計成敗的關鍵性環節。
圖形化系統設計—機器人設計的前沿方法
在Google X PRIZE機構、FIRST組織(科學技術的啟示與認知組織)、RoboCup以及美國國防高級研究計劃局(DARPA)之間展開的競爭推進了機器人學領域的創新。富有創新思維的開發者們將機器人學的前沿方法推進到了圖形化系統設計。在LabVIEW圖形化編程平臺下,機器人學的領域專家能夠對復雜的機器人方案進行快速的原型設計。這些創新工作者能夠不用關心底層的實現細節,可以將注意力集中到解決手上的工程問題中去。
機器人設計通常包含以下部分的工作內容,如圖1所示。
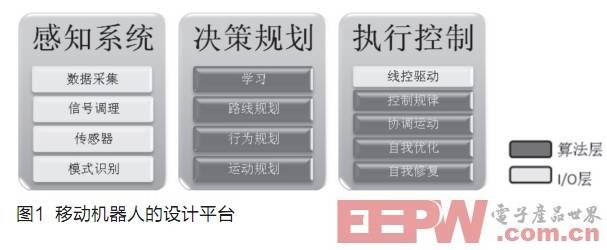
感知系統——連接到陀螺儀、CCD、光電、超聲等傳感器,獲取并處理信息。
決策規劃——相當于機器人的‘大腦’,根據算法進行控制決策,完成管理協調、信息處理、運動規劃等任務。
執行控制——根據具體的作業指令,通過驅動控制器、編碼器和電機完成機器人的伺服控制與運動執行。
網絡通訊與控制——機器人各子系統間的通訊網絡,完成分布式控制與實時控制。











評論