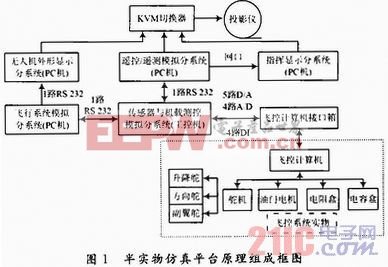
- 摘要:介紹了某型無人機飛控系統半實物仿真平臺的總體功能,闡述了該平臺的硬件選型原則、選型方案、基本功能及自制部件的設計過程,對各分系統仿真軟件設計框架進行了描述。最后,通過實際仿真對平臺的設計功能進行
- 關鍵字:
平臺 設計 仿真 實物 系統 無人機

- 摘要:為了使無人機飛行控制系統具有強大的數據處理能力、較低的功耗、較強的靈活性和更高的集成度,提出了一種以SmartFusion為核心的無人機飛行控制系統解決方案。為滿足飛控系統實時性和穩定性的要求,系統采用了
- 關鍵字:
控制系統 設計 飛行 無人機 SmartFusion 基于
- 摘要:通過介紹無人機導航系統的接收機特性,分析了無人機GPS 信號不穩定的原因,并采取合理布局GPS接收天線的位置、在GPS 接收天線與設備特別是有源設備之間加入隔離裝置等措施,提高了無人機導航系統的抗干擾性。引
- 關鍵字:
無人機 導航系統 抗干擾措施
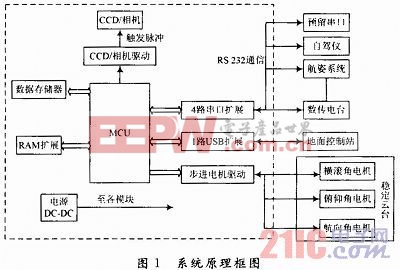
- 摘要:無人機相比較衛星和載人航空飛機遙感平臺而言,具有成本低、靈活性高的特點。為了滿足科學遙感實驗、完成遙感作業任務、協調無人機電子吊艙中多組件工作、控制遙感影像傳感器姿態,系統以AT89S52為主控芯片,擴
- 關鍵字:
作業 控制系統 設計 機載 平臺 航空 遙感 無人機
- 摘要:為了測量無人機真空速,設計了基于單片機的無人機真空速測量系統。根據真空速和動壓靜壓的關系式,采用分段線性插值的算法,測試了0-5 000m高度的實際真空速值,得到的結果相對誤差均不大于4%,能夠滿足系統精
- 關鍵字:
系統 設計 測量 真空 單片機 無人機 基于
- 摘要:自主障礙檢測與回避是無人機低高度飛行時保障其生存性的一項關鍵技術,有重要的研究意義。通過對機器視覺原理的研究,考慮到支持向量機方法能同時減小匹配難度和計算量,實時性能、泛化性能良好,故采用該方法
- 關鍵字:
支持向量機 無人機 檢測
- 摘要:為了解決小型無人機對飛控計算機小型化和高精度要求的問題,設計以DSP為核心的主控模塊,采用大規模邏輯器件CPLD進行地址譯碼,完成邏輯處理及隔離、驅動功能,配合接口芯片28C94和AD/DA轉換芯片設計接口模塊
- 關鍵字:
無人機 飛控 計算機

- 引言 無人飛機與載人飛機相比,它具有體積小、造價低、使用方便、對作戰環境要求低、戰場生存能力較強等優點,備受世界各國軍隊的青睞。無人駕駛飛機以其準確、高效和靈便的偵察、干擾、欺騙、搜索、校射及在非正
- 關鍵字:
系統 導航 設計 定位 無人機 SAR 基于
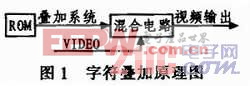
- 摘要:為了獲得二維圖像中目標空間方位信息的同時,保證圖像幀信息同步,采用了一種基于MB90092芯片的字符疊加方法。分析了視頻字符疊加原理,給出了字符疊加電路實現方法,設計了疊加系統主程序流程及中斷子程序流程
- 關鍵字:
模塊 設計 疊加 字符 信息系統 無人機
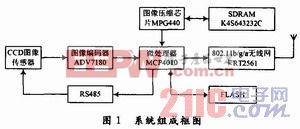
- 系統采用MCP4010微處理器作為主控芯片,通過其外圍接口,擴展了視頻采集模塊和無線網絡模塊,實現了視頻數據的采集及無線發送功能。其機栽部分基本實現了微型化,總重量僅為90 g,典型功耗4 W,可實時傳輸視頻圖像,傳輸有效半徑為3 km(視距范圍內)。該系統已成功應用在冀展為1.12 m的某微型多功能戰術無人機上,并完成了搭載試驗。
- 關鍵字:
傳輸系統 設計 實現 視頻 數字 無人機 無線 小型

- 無人機飛行模擬訓練系統是一種對地面操縱人員進行培訓的仿真軟件,它通過在計算機中建立飛行場景和飛機三維模型,由遙控器輸入指令進行驅動控制,從而實現飛機的飛行仿真。模擬訓練具有在無風險、無器材消耗的條件下訓練飛行操縱人員的特點,可以節約大量的訓練經費和訓練時間。在無人機飛行模擬訓練系統的設計過程中,首先要解決的問題是遙控器和計算機之間的通訊,以便把遙控器產生的遙控指令送到計算機中。由于遙控器本身不帶USB口,不能和計算機直接相連,因此需要設計USB接口電路完成通訊功能。
1 硬件設計
從理論上
- 關鍵字:
無人機 USB CH340
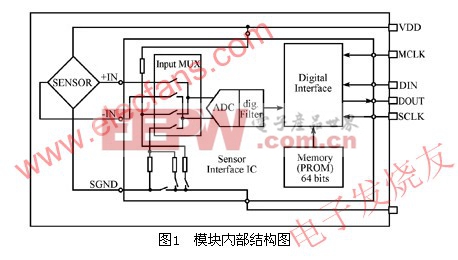
- 1.引言 無人機的高度測量傳統上一直采用靜壓傳感器作為感知手段,通過其壓差膜盒對大氣靜壓的感應,將大氣壓力轉化為模擬信號輸出,從而計算出實際的高度值。由于大氣壓力的變化除了與高度變化緊密聯系外,與本
- 關鍵字:
測量 系統 設計 高度 無人機 傳感器 MS5534B 基于
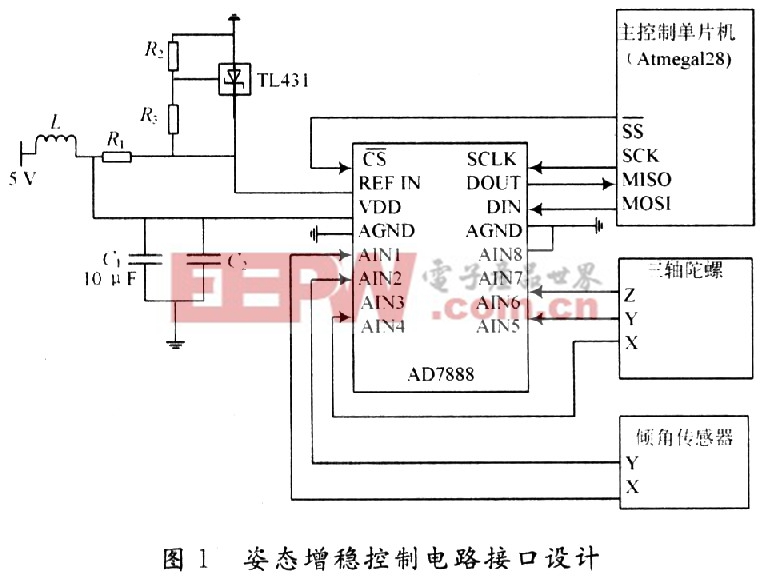
- 針對傳統微小型無人機在飛行過程中存在的穩定性問題,指出影響穩定的因素。提出一種基于三軸陀螺和傾角傳感器構成全姿態增穩控制系統的設計方案,采用EWTS82三軸陀螺和SCAlOOT雙軸傳感器組成姿態增穩硬件控制,結合軟件增穩控制,成功應用到某型微小型無人機上。大量的試飛結果表明,基于三軸陀螺和傾角傳感器構成的姿態增穩控制系統優于傳統的測量單元,有很好的應用價值。
- 關鍵字:
設計 實現 控制系統 姿態 無人機 小型
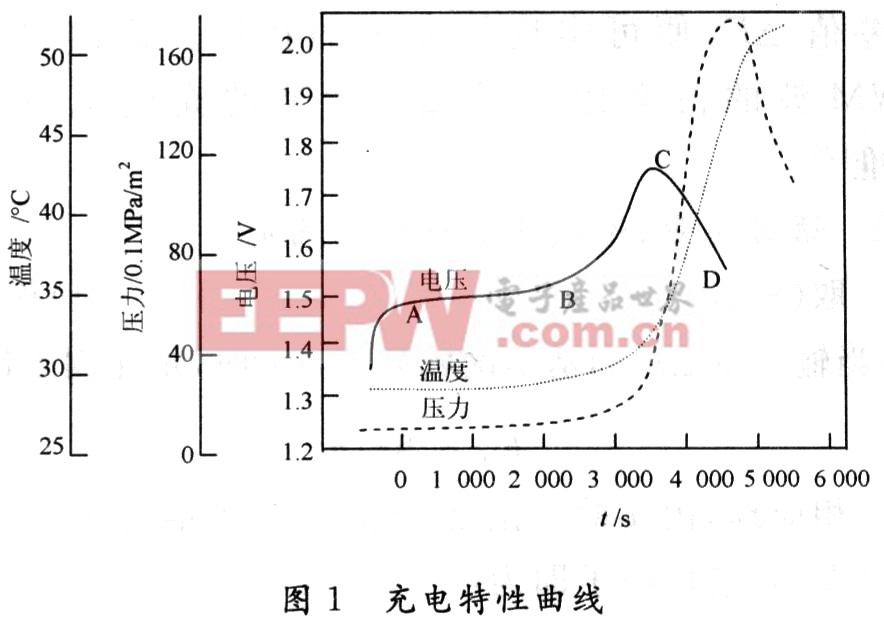
- 無人機應急電源作用重大但標配設備充電耗時且不夠安全。通過分析電源的充電特性,根據模糊控制理論提出了一種通過查表運算實施快速模糊控制的非線性充電方法,并以MC68HC05SR3單片機為控制核心,設計出針對某型無人機應急電源的智能控制充電系統,優化了充電曲線,提高了充電速度。實驗結果表明,該系統具有良好的快速響應曲線,可實現充電電流的最優控制,安全高效。
- 關鍵字:
快速 充電 方法 應急電源 無人機 模糊 控制 基于 轉換器
無人機介紹
無人機(unmannedaerialvehicle或drone)是一個許多國家用于描述最新一代無人駕駛飛機的術語。從字面上講,這個術語可以描述從風箏,無線電遙控飛機,到V-1飛彈從發展來的巡航導彈,但是在軍方的術語中僅限于可重復使用的比空氣重的飛行器。
目錄
1 概述
2 用途與優勢
3 技術途徑
4 發展方向
5 長航時無人機
6 中程無人偵察機
7 短程無人偵察 [
查看詳細 ]
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473