基于單片機的無人機真空速測量系統設計

摘要:為了測量無人機真空速,設計了基于單片機的無人機真空速測量系統。根據真空速和動壓靜壓的關系式,采用分段線性插值的算法,測試了0-5 000m高度的實際真空速值,得到的結果相對誤差均不大于4%,能夠滿足系統精度要求。測試結果表明:該系統具有良好的穩定性,能實時準確地測量出真空速值。
關鍵詞:單片機;真空速;動壓;靜壓;線性插值
真空速是指飛機相對空氣運動時所具有的真實速度,它是飛機安全飛行的重要參數。準確的真空速數據信息對于提高飛行的安全性、準確性和經濟性起著相當大的作用。飛機相對于空氣運動時,可根據運動的相對性將飛機看作不動,而空氣是以大小相等,方向相反的流速流過飛機。真空速無法直接測出,只能根據大氣靜壓和動壓間接計算出來。本文介紹了一種基于C8051F352單片機的無人機真空速測量系統的設計,該系統測量結果的相對誤差小于4%,能夠滿足無人機飛行控制系統的精度要求。
1 測量原理
無人機的真空速通常跟大氣靜壓和動壓有關,對于飛行高度不超過11 000 m,飛行馬赫數不大于1的情況,真空速可由公式(1)計算:
式中,PH為對應高度的大氣壓力(大氣靜壓),PD為大氣動壓,是大氣總壓與靜壓之差。式中各常數分別為:Pob=101 325 Pa,是標準海平面上的大氣靜壓;Tob=288 K,是標準海平面處大氣溫度;τb=0.0065 K/m是溫度遞減率;R=29.2746 m/K,是大氣常數;k=1.4是空氣絕熱指數;g=9.806 65是重力加速度。
從式(1)可看出,只要測量出大氣靜壓和動壓,便可根據計算公式,計算出真空速。
2 系統整體結構
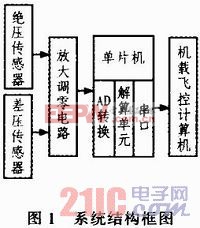
根據數字式大氣數據測量系統的組成和工作原理,筆者設計了以單片機為核心的真空速測量系統,其整體結構如圖1所示。絕壓傳感器和動壓傳感器感受到靜壓和動壓,并分別將其轉換為相應的電壓信號。由于傳感器的輸出信號較為微弱,因此,必須通過放大電路和調零電路以及濾波電路對其進行處理,產生符合要求的信號,然后傳送到AD轉換輸入端。單片機自帶的A/D轉換器將靜壓和動壓的模擬電壓信號轉換為數字信號,并送入單片機CPU進行處理,CPU根據真空速計算公式計算出相應真空速值。計算結果通過串口發送至機載飛控計算機,在顯示界面顯示出來。
3 系統硬件電路設計
3.1 壓力數據采集模塊
筆者設計的真空速測量系統要求工作在0~5 000 m高度范圍內,根據壓高公式(2),可計算出靜壓范圍在54 005~101 325 Pa之間。差壓傳感器的量程取決于飛行器真空速的量程。文中所測量的真空速范圍為50~400 km,則根據公式(1)可計算出動壓范圍在71~7 769 Pa之間。

根據靜壓和動壓范圍,本文的絕壓傳感器和差壓傳感器分別選用HONEYWELL公司的ASDX015A24R型傳感器和140PC02D型傳感器。ASDX015A 24R的量程為0~15 psi(103.419 kPa),精度在2%以內;140PC02D的量程為0~2 psi(13.7892 kPa),精度為0.25%。測壓器件選用GCY-1M型高精度綜合測試儀。可根據公式(3)計算出由傳感器所引起的誤差為3.23%。
本系統所選單片機C8051F352有2個16位AD轉換(ADC0和ADC1),靜壓和動壓傳感器輸出信號經放大調零后,可分別送入單片機AD轉換輸入端轉換為數字信號。

接地電阻相關文章:接地電阻測試方法












評論