基于SmartFusion的無人機飛行控制系統設計

0 引言
飛行控制系統是無人機的重要組成部分,是飛行控制算法的運行平臺,它的性能好壞直接關系著無人機能否安全可靠的飛行。隨著航空技術的發展,無人機飛行控制系統正向著多功能、高精度、小型化、可復用的方向發展。高精度要求無人機控制系統的精度高,穩定性好,能夠適應復雜的外界環境,因此控制算法比較復雜,計算速度快,精度高;小型化則對控制系統的重量和體積提出了更高的要求,要求控制系統的性能越高越好,體積越小越好。此外,無人機飛行控制系統還要具有實時、可靠、低成本和低功耗的特點。基于以上考慮,本文從實際工程應用出發,設計了一種基于SmartFusion的無人機飛行控制系統。
1 飛控系統總體設計
飛行控制系統在無人機上的功能主要有兩個:一是飛行控制,即無人機在空中保持飛機姿態與航跡的穩定,以及按地面無線電遙控指令或者預先設定好的高度、航線、航向、姿態角等改變飛機姿態與航跡,保證飛機的穩定飛行,這就是通常所謂的自動駕駛;二是飛行管理,即完成飛行狀態參數采集、導航計算、遙測數據傳送、故障診斷處理、應急情況處理、任務設備的控制與管理等工作。
飛行控制系統主要完成3個功能任務,其層次構成為三層:最底層的任務是提高無人機運動和突風減緩的固有阻尼——三個軸方向的阻尼器功能;第2層的任務是穩定無人機的姿態角——基本駕駛儀的功能(主要進行角運動控制);第3層的任務是控制飛行高度、航跡和飛行速度,實現較高級自動駕駛功能。飛行控制系統原理框圖見圖1。

由上述分析易知,飛行控制系統主要由飛行控制器、傳感器(或敏感元件)、舵機3部分組成。無人機飛行控制系統的基本架構如圖2所示。
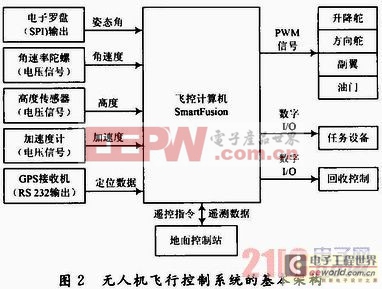
飛行控制器是以SmartFusion為核心的控制計算機,它是無人機的中央控制單元,負責飛機上各個單元的協調工作,并與地面站之間進行數據傳輸。同時根據控制算法和地面站的命令,保持飛機以一定的姿態飛行。
傳感器包括電子羅盤、角速率傳感器、高度傳感器、加速度計和GPS接收機等。電子羅盤選用霍尼韋爾HMR3300,它可以測量航向、傾角和翻滾角,輸出方式為SPI串行輸出。角速率傳感器采用的是ADI公司的ADXRS300,其輸出電壓與偏航角速率成正比。高度傳感器選擇利用半導體材料的壓阻效應原理制造的MPX4115A大氣壓力傳感器。加速度計采用的是ADI公司的ADXL203,它是電容式加速度計,具有高精度、高穩定性和低功耗等特點,輸出電壓經信號調理后正比于加速度值。GPS接收機選用GPS-G03A(H),它是一款超低功耗的GPS天線接收一體機,可給出經緯度,時間和速度等信息,以RS 232串口形式傳輸數據。
舵機包括升降舵、方向舵、副翼。舵機的控制信號是脈寬調制信號,便于和飛控計算機進行接口。
2 飛控計算機硬件電路設計
無人機的飛行控制計算機是無人機飛行控制系統的核心,其硬件結構如圖3所示。它的功能主要由SmartFusion單芯片最小系統及外圍電路實現,另外還有一個電源模塊用來提供系統所需的各類電壓和對供電電池進行管理。
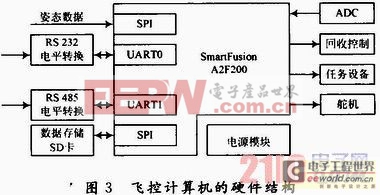
SmartFusion系列結合了邏輯、微控制器子系統(MSS)和可編程模擬模塊,即帶有Actel經過驗證的FPGA架構和基于ARM Cortex-M3硬核處理器子系統,以及可編程FLASH模擬模塊。實現易于使用的完全可定制系統設計平臺,使嵌入式設計人員無需進行線路板級改變,就能夠快速優化硬件/軟件并折中權衡。在SmartFusion器件內,所有數據都會從處理器傳送到FPGA,或從模擬模塊傳送到處理器,或在FPGA和片上模擬模塊之間傳送。此外,Actel的FLASHLock技術也提供了出色的IP安全保障。






評論