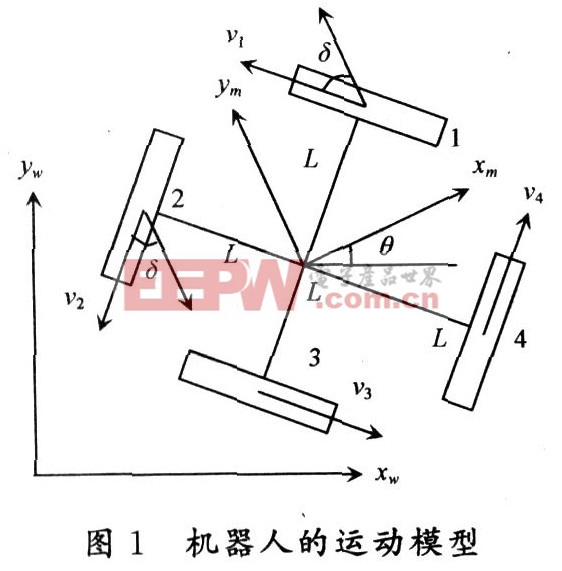
- 摘 要:通過對足球機器人運動學模型的分析,考慮到系統的時變、非線性、干擾大等特點,以全向移動機器人為研究平臺,提出一種將模糊控制與傳統PID控制相結合的方法,應用到足球機器人的運動控制系統中。針對足球機器
- 關鍵字:
運動 控制 研究 PID 模糊 移動 機器人 全方位
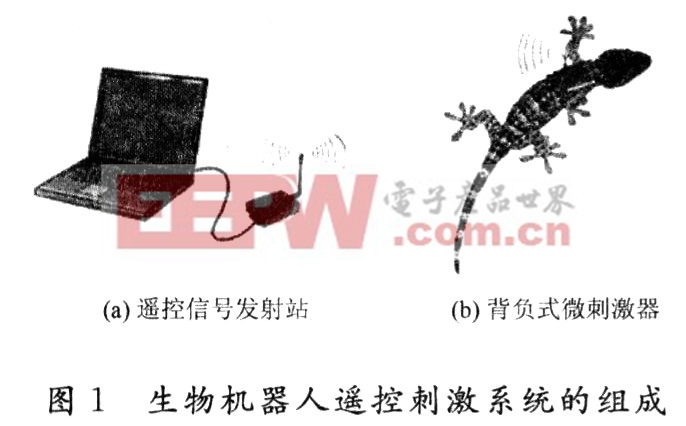
- 遙控刺激系統是動物機器人擺脫各種信號線束縛實現自由運動的必經之路,也是動物機器人走出實驗室的必需設備,它的研制在動物機器人研究中具有重要的意義。恒流多通道動物機器人遙控刺激系統由“刺激信號發射站”和tt背負式微刺激器”兩大部分組成,其不但能夠實現對動物機器人雙相的恒流脈沖刺激,而且每通道的多個刺激參數分別可調,同時還具有多點住聯合刺激和延時刺激的功能。其中,“背負式微刺激器’’尺寸小,重量輕,能耗低,性能可靠,適合小型動物的無線刺激實驗。
- 關鍵字:
系統 研制 刺激 遙控 動物 機器人 通道 轉換器
- 摘 要:為了簡化仿人機器人控制系統結構,增強機器人系統的功能。采用PC/104嵌入式系統作為仿人機器的主控計算機,完成圖像處理,做出控制決策,計算并生成運動序列。關節控制器選用C8051F310單片機,采用串口與主控
- 關鍵字:
控制系統 設計 機器人 單片機 PC 基于
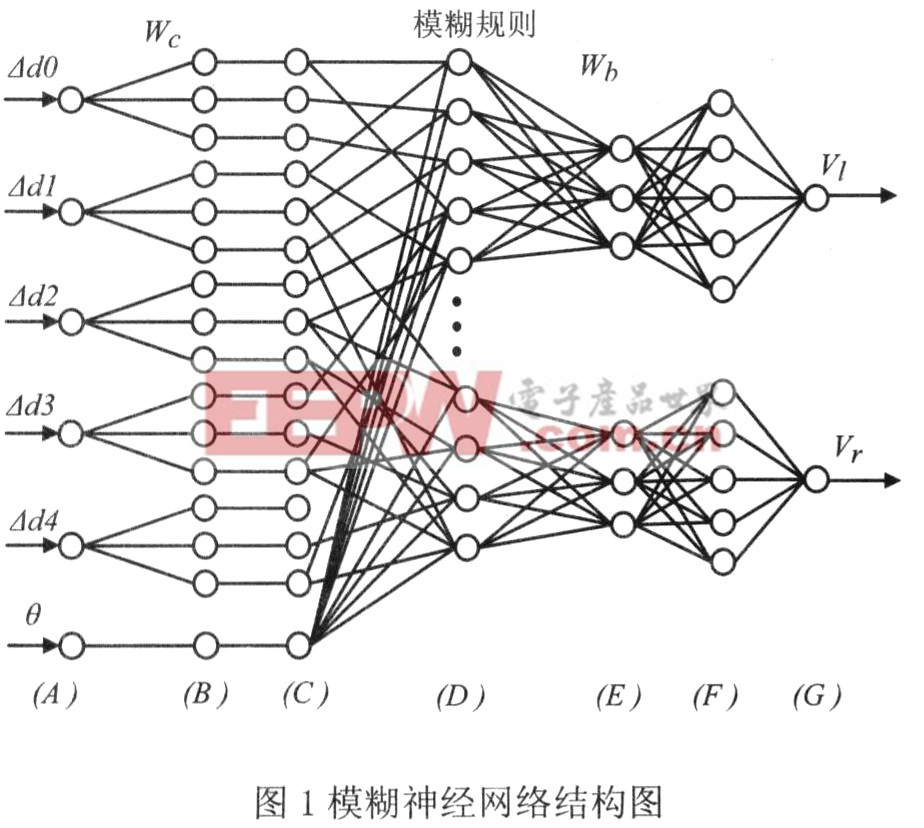
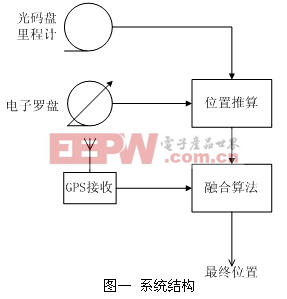
- 移動機器人沿墻導航控制包含了追蹤和避障兩種情況,是移動機器人研究中的常見問題。它是指機器人在一定方向上沿墻運動,或者更一般意義上的沿著物體輪廓運動,并與墻保持一定距離。移動機器人利用聲納采集機器人與墻體的距離和角度信息,通過模糊神經網絡將輸入數據進行融合,從而判斷移動機器人的位姿信息,輸出左右輪速度控制其動作。實驗證明此方法可以有效地保證移動機器人在安全距離內沿墻體運動。對比采用模糊神經網絡前后的實驗,采用后的移動機器人沿墻導航控制軌跡優于采用前,均方誤差大大減小。
- 關鍵字:
導航 控制 機器人 移動 模糊 神經網絡 基于
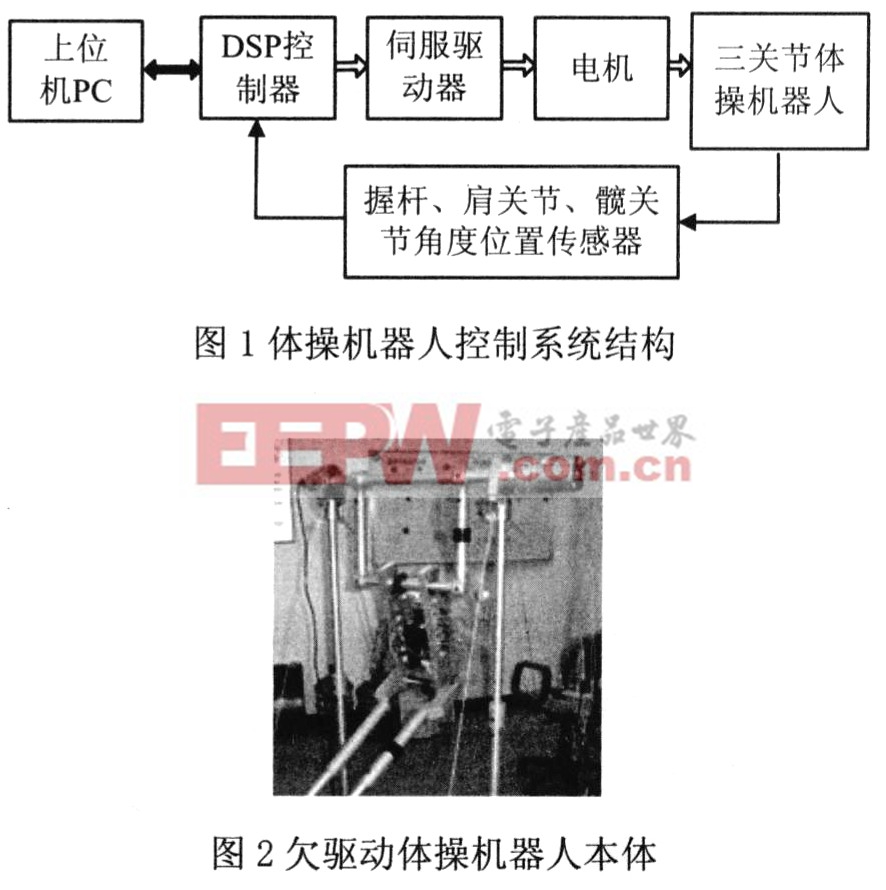
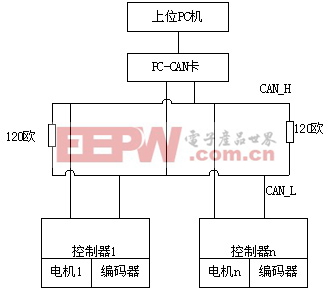
- 針對欠驅動機器人控制系統,給出一種基于DSP控制的類人形的三關節欠驅動體操機器人。首先以ADSP218l為核心設計出控制器,通過高速PCI總線與上位機PC通訊,采用直流電機伺服控制。然后依據建立的體操機器人動力學模型提出基于能量增加的正弦和斜坡函數輸入方式,經對體操機器人作搖起控制實驗,實驗顯示,設計的三關節欠驅動體操機器人控制系統滿足實時性、穩定性和準確性要求。
- 關鍵字:
控制 設計 機器人 體操 DSP 驅動 基于 驅動器
- 在最近一些機器人競賽中,對于機器人的尋線行走,除了要求精確之外,對機器人尋線速度也提出了很高的要求,速度往往成為某些比賽制勝的關鍵。在最近教育部推出的全國大學生智能汽車大賽中,更是將尋線速度定為比賽的
- 關鍵字:
設計 實現 機器人 高速 視覺 基于 移動機器人 單片機 視覺 尋線
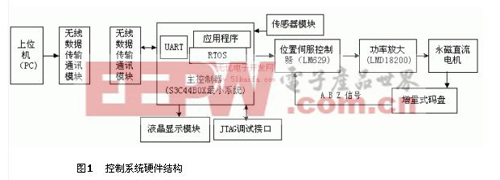
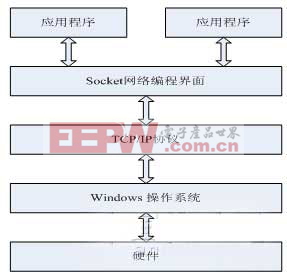
- 基于ARM+μc/os Ⅱ的教學機器人控制系統設計與實現,1.引言近年來隨著人工智能技術、計算機技術等相關技術的發展,對智能機器人的研究越來越多。在教育領域,許多院校已在學生中開設了機器人學方面的有關課程。為了滿足機器人學方面的有關課程教學示范和實驗教學的需求
- 關鍵字:
控制系統 設計 實現 機器人 教學 ARM c/os 基于 機器人 ARM UCOS 伺服
- 機器人開發平臺的進展主要集中在如何讓開發人員著手工作,但它們也提供更急需的軟件部件重用方法,如從一個機器...
- 關鍵字:
機器人 開發平臺 Labview
- 20世紀90年代以來,數字信號處理器(DSP)在自動控制中得到越來越廣泛的應用。這主要是因為它具有以下優點:(1)...
- 關鍵字:
DSP 機器人
?機器人介紹
您好,目前還沒有人創建詞條?機器人!
歡迎您創建該詞條,闡述對?機器人的理解,并與今后在此搜索?機器人的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473