基于DSP的欠驅(qū)動(dòng)體操機(jī)器人的搖起控制設(shè)計(jì)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
欠驅(qū)動(dòng)機(jī)器人是一種部分關(guān)節(jié)為被動(dòng)關(guān)節(jié),能用較少的驅(qū)動(dòng)裝置完成復(fù)雜任務(wù)的機(jī)械系統(tǒng)。欠驅(qū)動(dòng)機(jī)器人是近年來(lái)開(kāi)始出現(xiàn)的一個(gè)較新的研究領(lǐng)域,針對(duì)欠驅(qū)動(dòng)機(jī)器人系統(tǒng)的研究目前得到不少學(xué)者的關(guān)注。欠驅(qū)動(dòng)機(jī)器人系統(tǒng)在很多的機(jī)器人系統(tǒng)例如多指機(jī)器人手、輪式移動(dòng)機(jī)器人、太空機(jī)器人等非完整約束系統(tǒng)中都存在。因此近幾年來(lái),欠驅(qū)動(dòng)機(jī)器人的運(yùn)動(dòng)控制問(wèn)題引起國(guó)內(nèi)外廣泛的研究興趣。同時(shí),隨著集成芯片技術(shù)的飛速發(fā)展,人們對(duì)欠驅(qū)動(dòng)機(jī)器人控制的實(shí)時(shí)性和精度提出了越來(lái)越高的要求。
本文設(shè)計(jì)了一種基于DSP的機(jī)器人控制系統(tǒng)。該控制系統(tǒng)采用兩級(jí)控制結(jié)構(gòu)。以通用PC作為上位機(jī),完成目標(biāo)設(shè)定、軌跡生成、系統(tǒng)管理和人機(jī)接口等功能;以美國(guó)Analog Device公司的定點(diǎn)數(shù)字信號(hào)處理芯片ADSP2181為核心,作為機(jī)器人控制的下位機(jī)。該控制器充分應(yīng)用了DSP運(yùn)算的高速性,提高了系統(tǒng)的實(shí)時(shí)和穩(wěn)定性。
2 體操機(jī)器人硬件系統(tǒng)設(shè)計(jì)
2.1 控制系統(tǒng)硬件結(jié)構(gòu)
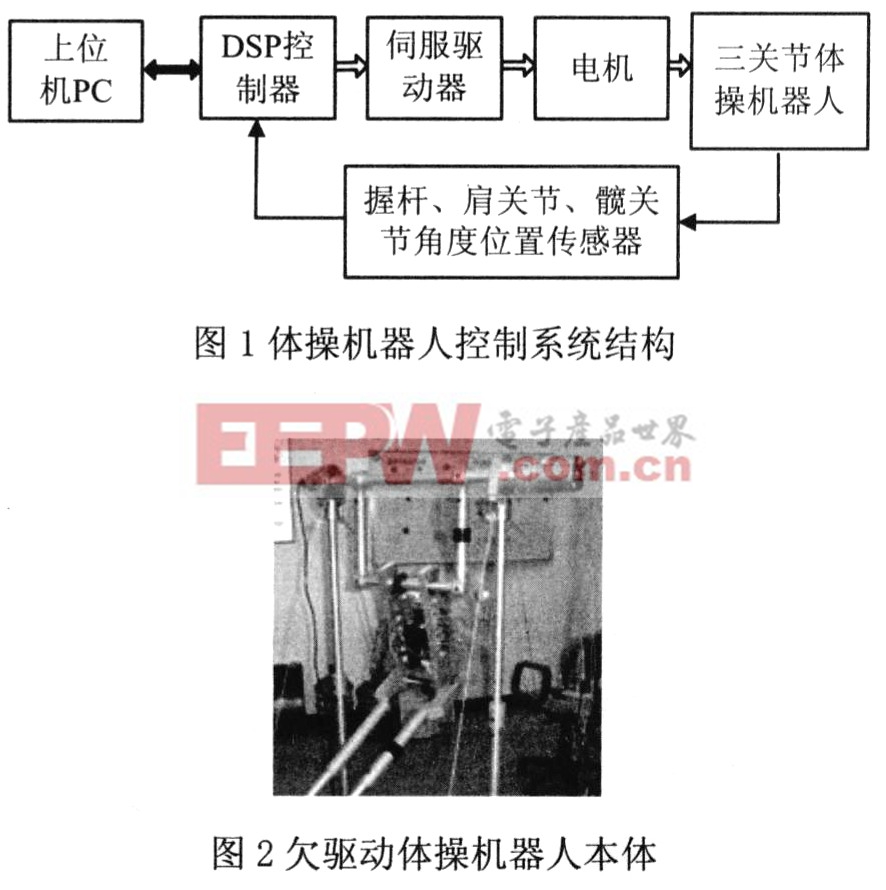
控制對(duì)象為三關(guān)節(jié)欠驅(qū)動(dòng)體操機(jī)器人,其中手臂關(guān)節(jié)為被動(dòng)關(guān)節(jié)。控制轉(zhuǎn)矩來(lái)自?xún)膳_(tái)直流伺服電機(jī),配5l:l減速器伺服電機(jī),經(jīng)軸線相交的圓錐齒輪傳輸至驅(qū)動(dòng)關(guān)節(jié),驅(qū)動(dòng)關(guān)節(jié)通過(guò)動(dòng)力耦合作用使被動(dòng)關(guān)節(jié)產(chǎn)生運(yùn)動(dòng)。欠驅(qū)動(dòng)機(jī)器人控制系統(tǒng)的任務(wù)就是對(duì)驅(qū)動(dòng)關(guān)節(jié)電機(jī)進(jìn)行控制,電機(jī)運(yùn)行之前從控制界面輸入控制目標(biāo)參數(shù),上位PC機(jī)負(fù)責(zé)發(fā)送控制命令與數(shù)據(jù)采集。DSP處于整個(gè)控制系統(tǒng)的底層,主要用來(lái)接收來(lái)自PC機(jī)的控制命令,對(duì)驅(qū)動(dòng)關(guān)節(jié)執(zhí)行電機(jī)控制,同時(shí)把底層信息反饋給上位PC機(jī),以實(shí)現(xiàn)機(jī)器人運(yùn)動(dòng)信息的數(shù)據(jù)分析等功能,用一塊DSP運(yùn)動(dòng)控制卡對(duì)機(jī)器人的肩關(guān)節(jié)或髖關(guān)節(jié)進(jìn)行插補(bǔ)計(jì)算和伺服控制,采用PCI標(biāo)準(zhǔn)總線進(jìn)行上、下位機(jī)的通訊,實(shí)現(xiàn)雙速率運(yùn)行。控制箱面板提供了各關(guān)節(jié)工作狀態(tài)顯示及伺服報(bào)警提示,還可以對(duì)關(guān)節(jié)進(jìn)行手動(dòng)控制。三關(guān)節(jié)欠驅(qū)動(dòng)體操機(jī)器人控制系統(tǒng)結(jié)構(gòu)如圖l所示,體操機(jī)器人本體如圖2所示。
2.2 運(yùn)動(dòng)控制器結(jié)構(gòu)
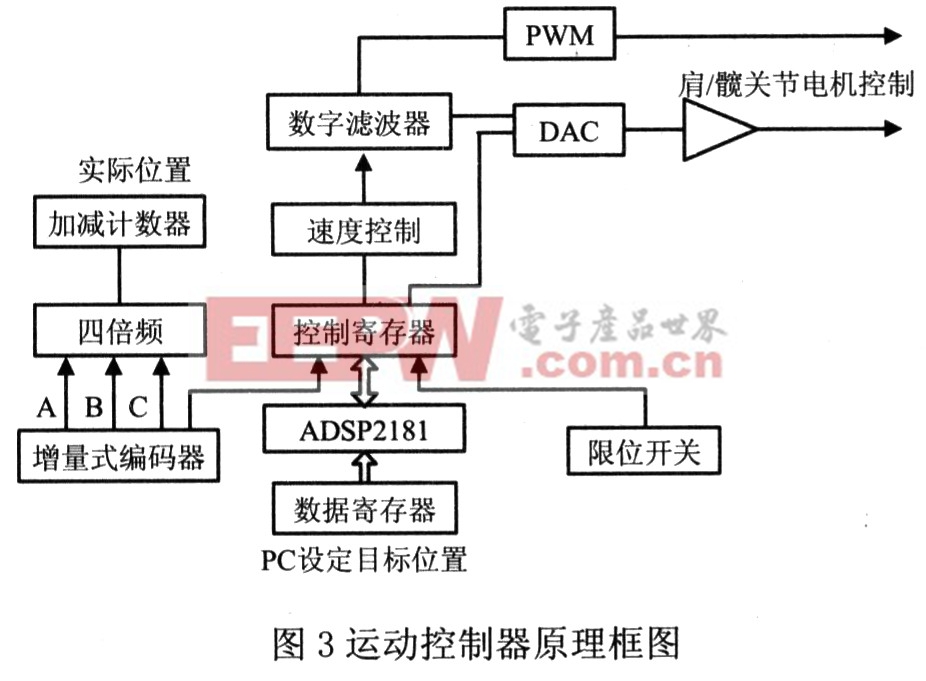
系統(tǒng)采用ADSP218l數(shù)字信號(hào)處理器為核心,實(shí)現(xiàn)高性能的控制運(yùn)算的伺服運(yùn)動(dòng)控制器。如圖3所示,運(yùn)動(dòng)控制器的控制過(guò)程為增量編碼器的A、B相信號(hào)作為位置反饋輸入信號(hào),運(yùn)動(dòng)控制器通過(guò)四倍頻、加減計(jì)數(shù)器得到實(shí)際位置。實(shí)際位置的信息保存在位置寄存器中,PC機(jī)可通過(guò)控制寄存器讀取。運(yùn)動(dòng)控制器的目標(biāo)位置由PC機(jī)設(shè)定,通過(guò)內(nèi)部計(jì)算得到位置誤差,經(jīng)過(guò)數(shù)字伺服濾波器后,送到數(shù)模轉(zhuǎn)換(DAC)或脈寬調(diào)制器(PWM)硬件處理電路,經(jīng)過(guò)轉(zhuǎn)換最后輸出伺服電機(jī)的控制信號(hào):+/-lOV模擬信號(hào)或PWM信號(hào)。
2.3 系統(tǒng)的通訊
系統(tǒng)采用PCI總線進(jìn)行通訊。PCI總線的主要優(yōu)點(diǎn)是性能高(數(shù)據(jù)傳輸率可達(dá)到132 264Mb/s),總線通用性強(qiáng),成本低,使用方便靈活。系統(tǒng)通訊采用PLX9054接口芯片,結(jié)合雙口RAM,實(shí)現(xiàn)了DSP和PCI總線間的雙向高速實(shí)時(shí)數(shù)據(jù)交換。PCI總線與雙口RAM的數(shù)據(jù)交換,采用了定時(shí)傳送加握手信號(hào)的方式進(jìn)行。具體實(shí)現(xiàn)如下:上位機(jī)每隔一個(gè)固定的時(shí)間T下傳一組數(shù)據(jù),數(shù)據(jù)傳送完成后,發(fā)出一個(gè)發(fā)送完信號(hào),下位機(jī)接受到這個(gè)數(shù)據(jù)后,立即從雙口RAM中讀取數(shù)據(jù)。下位機(jī)上傳數(shù)據(jù)也采用同樣的處理方式。這種方式特別適合于機(jī)器人控制系統(tǒng)的通訊。
2.4 驅(qū)動(dòng)元件的選擇
驅(qū)動(dòng)元件選擇了直流伺服電機(jī),其參數(shù)為200W/7220mm/107mN?m Maxon。其驅(qū)動(dòng)器可實(shí)現(xiàn)位置、速度和轉(zhuǎn)矩三種不同的控制方式:具有共振抑制和控制功能,可彌補(bǔ)機(jī)械的剛性不足,從而實(shí)現(xiàn)高速定位。同時(shí),還采用PID濾波器,外加速度和加速度前饋,即PID+Kvff+Kaff濾波器。通過(guò)調(diào)節(jié)各參數(shù),濾波器能對(duì)大多數(shù)系統(tǒng)實(shí)現(xiàn)精確而穩(wěn)定的控制。因此非常適合應(yīng)用于機(jī)器人控制系統(tǒng)。
3 搖起控制策略
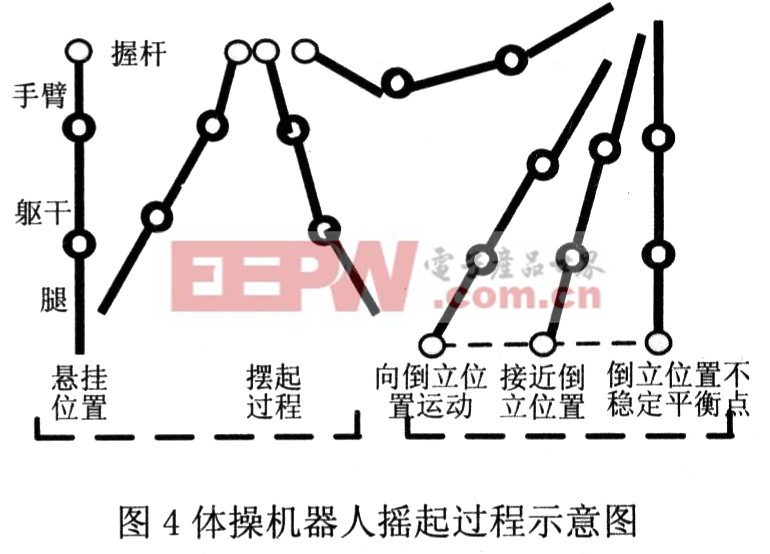
由于體操機(jī)器人大范圍的運(yùn)動(dòng),搖起問(wèn)題是高度非線性又極具挑戰(zhàn)性的問(wèn)題。搖起過(guò)程如同人在單杠一樣,先使體操機(jī)器人來(lái)回?fù)u動(dòng)幾次,體操機(jī)器人始終在下,一旦有足夠的能量施加到系統(tǒng)上,機(jī)器人即進(jìn)入倒立狀態(tài),如圖4所示。
Spong建議一種非線性反饋方法,這種方法利用部分線性反饋定義PD控制器。從直觀上講,當(dāng)體操機(jī)器人從懸掛穩(wěn)定平衡狀態(tài)轉(zhuǎn)移到倒立不穩(wěn)定平衡狀態(tài)的過(guò)程中,其勢(shì)能是不斷增加的,因此需要向系統(tǒng)輸入足夠的能量。本研究從能量增加的角度出發(fā),采用帶有振幅和頻率的正弦方式和斜坡函數(shù)輸入,這樣可同時(shí)增加擺動(dòng)。

伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理
pid控制器相關(guān)文章:pid控制器原理










評(píng)論