基于PC/104與單片機的仿人機器人控制系統設計

摘 要:為了簡化仿人機器人控制系統結構,增強機器人系統的功能。采用PC/104嵌入式系統作為仿人機器的主控計算機,完成圖像處理,做出控制決策,計算并生成運動序列。關節控制器選用C8051F310單片機,采用串口與主控計算機通信,接收來自主控計算機的運動序列指令,產生PWM波,經過放大電路,實現21路電機的控制。經過實驗,得到圖像采集分析結果和仿人機器人穩態步行。實驗表明,這種控制系統能夠實現仿人機器人的控制。
關鍵詞:仿人機器人;主控制計算機;關節控制器;PWM波
0 引 言
機器人作為一個各學科交叉的復雜系統,越來越多的科研者采用機器人作為實驗平臺,因為它包括機械結構的設計,控制系統的構建,信息的采集與處理,運動學和動力學分析,人工智能等多方面知識的融合。仿人機器人從最初簡單模擬人的外形、動作、行走等,逐漸向人的思維、視覺、觸覺、智能等方面轉變,這就對機器人整個系統提出了更高的要求,不但要進一步完善機器人的機械結構和安裝,而且要增強控制系統的功能和處理能力。
對于控制系統而言,目前在仿人機器人上常用的控制芯片有DSP,ARM或其他一些單片機等,為了進一步增強機器人的可擴展性,這里采用嵌入式系統PC/104作為機器人的主控制計算機,它具有實時性好,成本低,小型化的優點,克服了傳統的基于單片機控制系統功能不足和基于PC控制系統非實時性的缺點,在仿人機器人應用中具有廣泛前景。
l 仿人機器人結構及控制系統
該機器人共有21個自由度,其中頭部2個自由度,可以實現頭部的俯仰和左右偏轉,在頭上裝有一個CCD攝像機,并且帶有視覺采集卡以及視覺處理計算機,能夠實現目標的識別和定位,為主控計算機直接提供目標信息。每個手臂3個自由度,能夠完成伸展和彎曲等動作,在機器人摔倒后可以提供支撐力,讓機器人可以自行起立。腰上1個自由度,實現仿人機器人軀干的前傾和后仰,便于機器人在行走或執行手上動作時重心的調節,增強機器人的可控性和穩定性。下肢6個自由度,其中踝關節處2個自由度,髖關節處3個自由度,與人的腿部結構相似,能夠靈活的完成下肢的各種動作。仿人機器人的整個結構采用框架式結構,有利于減輕機器人結構上的重量,提高機器人的承載能力,為機器人控制系統的改進提供了更大的空間。如圖1所示為仿人機器人實物圖。
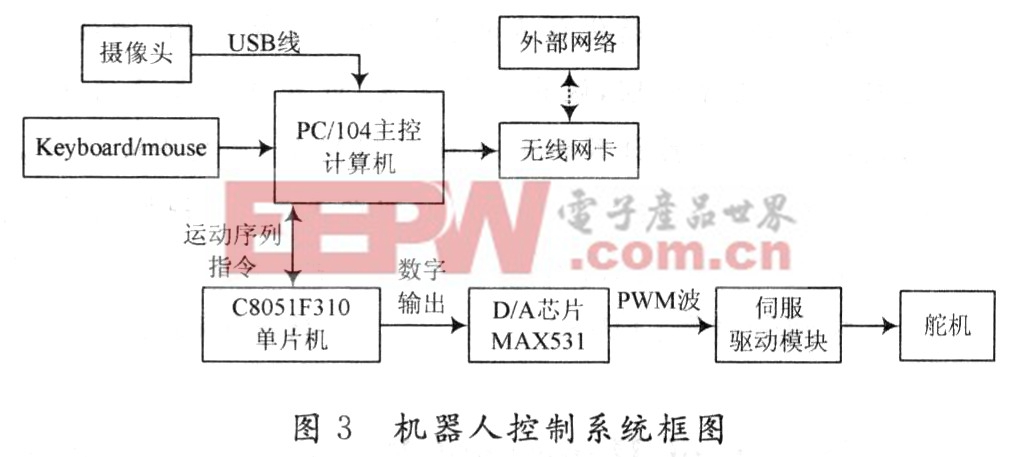
仿人機器人控制系統以ACS一4051VEPC/104主板模塊作為主控制器,通過USB直接連接攝像頭,一個RS 232串行口與關節控制器相連,實現主控制計算機與關節控制器的通信。驅動模塊和關節控制器集成在一個PC板上,主要實現PWM波的產生,驅動電機轉動。ACS一4051VE主板集成了Intel 82559ERl0/100 Mb/s以太網卡,外接一個無線網卡可以實現與外部無線網絡的通信。仿人機器人控制系統總體上主要分為2個部分:主控制器模塊和關節控制器模塊。它的總體結構實物圖如圖2所示。












評論