TMS320F206DSP的冗余度TT-VGT機器人

20世紀90年代以來,數字信號處理器(DSP)在自動控制中得到越來越廣泛的應用。這主要是因為它具有以下優(yōu)點:(1)并行體系結構和專用的硬件乘法器使得DSP運算能力極強;(2)高速特性使得DSP能實現實時處理和實時控制。
據調查,目前將DSP應用于機器人控制系統的方案,通常是將機器人位置控制中運動學計算任務交給PC機完成,PC機將計算結果(機器人各關節(jié)的轉角)下載到以DSP芯片為核心的電機控制器,實現機器人控制[2]。本文提出將機器人運動學計算任務直接交給DSP的控制方案,利用DSP的并行性計算特點,提高了計算速度,縮小了控制系統的體積。仿真結果表明,該方案計算精度和實時性都較好。
1 TMS320F206 DSP結構特點
TMS320F206DSP基本結構特點包括:①哈佛結構;②流水線操作;③專用的硬件乘法器;④特殊的DSP指令;⑤快速的指令周期(25ns);⑥芯片內部集成了4.5KRAM和32K FLASH RAM,大多數程序及數據可存放在DSP芯片內。這些特點使得該芯片可以實現快速的DSP計算,并能使大部分運算能夠在一個指令周期內完成。TMS320F206的并行性表現在以下兩方面:
(1)哈佛結構是不同于傳統的馮諾曼結構的并行體系結構,其主要特點是將程序和數據存儲在不同的存儲空間,因此取指令和執(zhí)行能完全重疊運行。
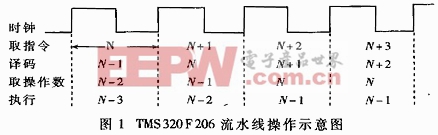
(2)DSP芯片廣泛采用流水線以減少指令執(zhí)行時間。指令流水線由一系列總線操作組成。TMS320F206流水線具有4個獨立的操作階段:取指令、譯碼、取操作數和執(zhí)行,如圖1所示。由于4個操作階段是獨立的,因此,這些操作可交疊地進行。











評論