非接觸式搬運半導(dǎo)體晶圓機器人用工具面世

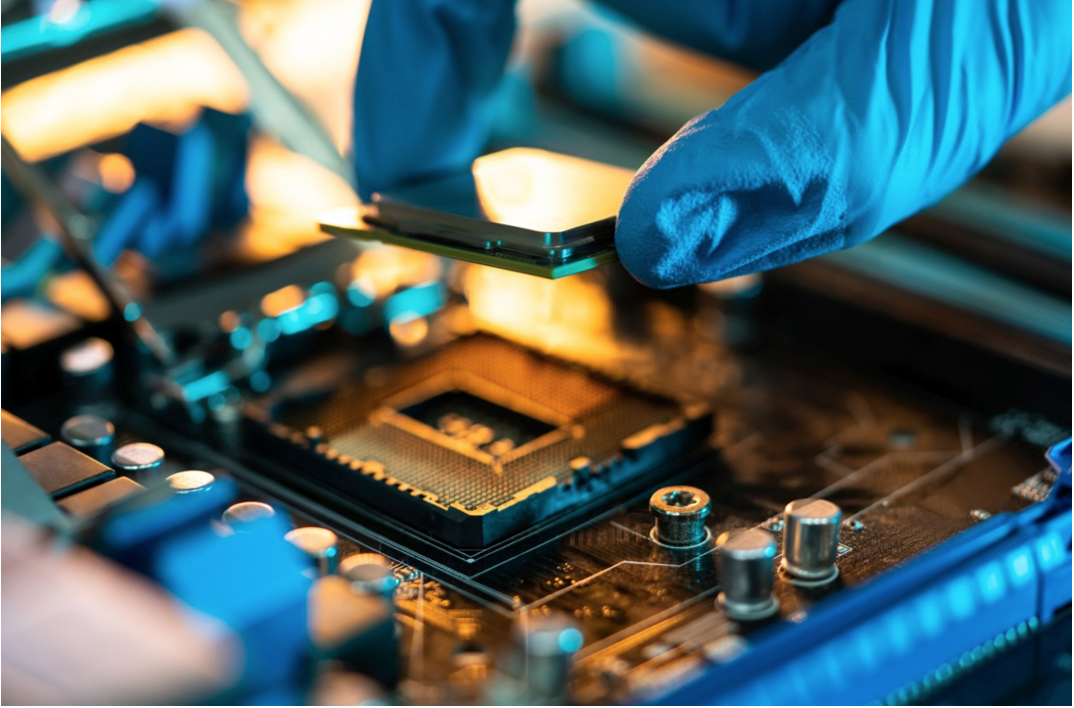
德國Zimmermann & Schilp Handhabungstechnik GmbH開發(fā)出了生產(chǎn)工序中能以非接觸方式搬運最大300mm的機器人用“Non-contact Wafer Gripper”。具體地,就是利用在工具表面形成一層薄膜,使晶圓漂浮于其上。
本文引用地址:http://www.104case.com/article/82048.htm可利用工具一側(cè)的超聲波振動使工具上方和晶圓下方的空氣薄膜的壓力增大。其原理與空氣軸承相似,但該產(chǎn)品無需以壓縮機等從外部供應(yīng)高壓空氣。工具和晶圓的距離約在0.05mm~0.5mm之間。
工具翻轉(zhuǎn)時,不是用超聲波而是用氣泵吸附晶圓。據(jù)介紹,此時晶圓和工具之間也不接觸,常態(tài)下使周圍空氣流動即可形成空氣薄膜。








評論