基于ADSP-BF561的車輛輔助駕駛系統硬件設計

引言
20世紀八十年代以來.電子技術和計算機技術快速發展,汽車行駛安全方面的研究也進入了一個嶄新的領域。其發展方向主要體現在智能化的汽車主被動安全研究,其中安全輔助駕駛是當前國際智能交通系統研究的重要內容之一。目前CCD或CMOS攝像機配合性能優良和價格低廉的DSP處理器在車輛安全輔助駕駛領域中的應用也不斷增加。其中ADI公司的Blackfin系列處理器基于ADI和Intel公司聯合開發的微信號架構(Micro Signal Architecture.MSA).應用于交通標志識別、智能燈光控制、車道變換輔助、盲點識別、后視攝像機和停車輔助、自適應巡航系統(Adaptive Cruise Control,ACCl、夜間輔助駕駛和智能安全氣囊等。因此對Black6n系列處理器的硬件開發為整個系統提供良好的研究平臺和開發環境。
1 車輛輔助駕駛系統框架設計
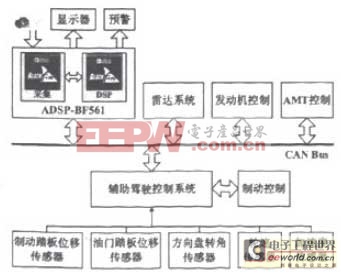
圖1系統總體框架
車輛輔助駕駛的主要目的是為了提高汽車行駛的安全性。通過安裝在車輛上的各種傳感器獲得車輛、道路狀況以及周圍車輛狀況等信息.為駕駛員提供有效的預警信號.并在一定的條件下對車輛實施安全控制。系統主要由視覺系統、雷達系統、輔助駕駛控制系統、機械式自動變速控制系統、發動機控制系統、制動控制系統組成,感知車輛狀態的傳感有制動踏板位移傳感器、油門踏板位移傳感器、轉向角度傳感器、車輪轉速傳感器、加速度傳感器,其框架結構如圖1所示。
1.1環境感知系統
視覺傳感器采用AIR-7010C CCD攝像機.通過ADV7183接入ADSP-BF561并行輸入輸出外圍接口單元進行視頻解碼,雷達系統采用IBEO公司的LD-ML多層激光雷達系統.經過視覺處理算法后的圖像數據與雷達數據進行數據融合.最終得出障礙物的有效信息,并通過CAN總線發送至輔助駕駛控制單元進行策略控制。
1.2底層控制系統
系統通過CAN總線獲取有效的車輛行駛狀態信息和車輛行駛環境信息,監控車輛的縱向和橫向行駛安全,在一定的行駛條件下對車輛縱向行駛進行干預控制。輔助駕駛控制策略單元通過獲取環境感知傳感器與車輛狀態傳感器而對發動機轉速的控制、機械式自動變速器fAM,I')檔位和離合器的控制、制動系統的控制。
2 硬件系統的組成與設計
Blackfin處理器架構基于一個10級RISC MCU/DSP流水線和一個專為實現最佳代碼密度而設計的混合16/32位指令集架構.除此之外還包含加速視頻和圖像處理的指令,因此Blackfin系列的處理器應用于通信、圖像、語音等方面,ADSP-BF561是目前Blackfin家族中性能最高的一款處理器,其特點如下:
1)2個對稱最高頻率可達600MHz的高性能Blackfin內核;
2)每個內核包括2個16位MAC、2個40位ALU、4個8位視頻ALU以及1個40位移位器:
3)內核電壓0.8V-1.2V,兼容3.3V及2.5V I/O;,
4)328K Bytes片內存儲器.每個內核32Kbytes的Ll指令SRAM/Cache、64Kbytes的L1數據SRAM/Cache、4KBytes的L1臨時數據SRAM,128Kbytes共享的L2 SRAM:
5)2個并行輸入/輸出外圍接口單元(PPI),支持ITU-R656視頻數據格式:2個雙通道全雙工同步串行接13,支持8個立體聲璐通道:2個16通道DMA控制器和1個內部存儲器DMA控制器;12個通用32-bit定時肘數器;支持IrDA的UART;2個“看門狗”定時器;48個可編程標志引腳;1x-63x倍頻的片內PLL。
2.1電源及復位電路
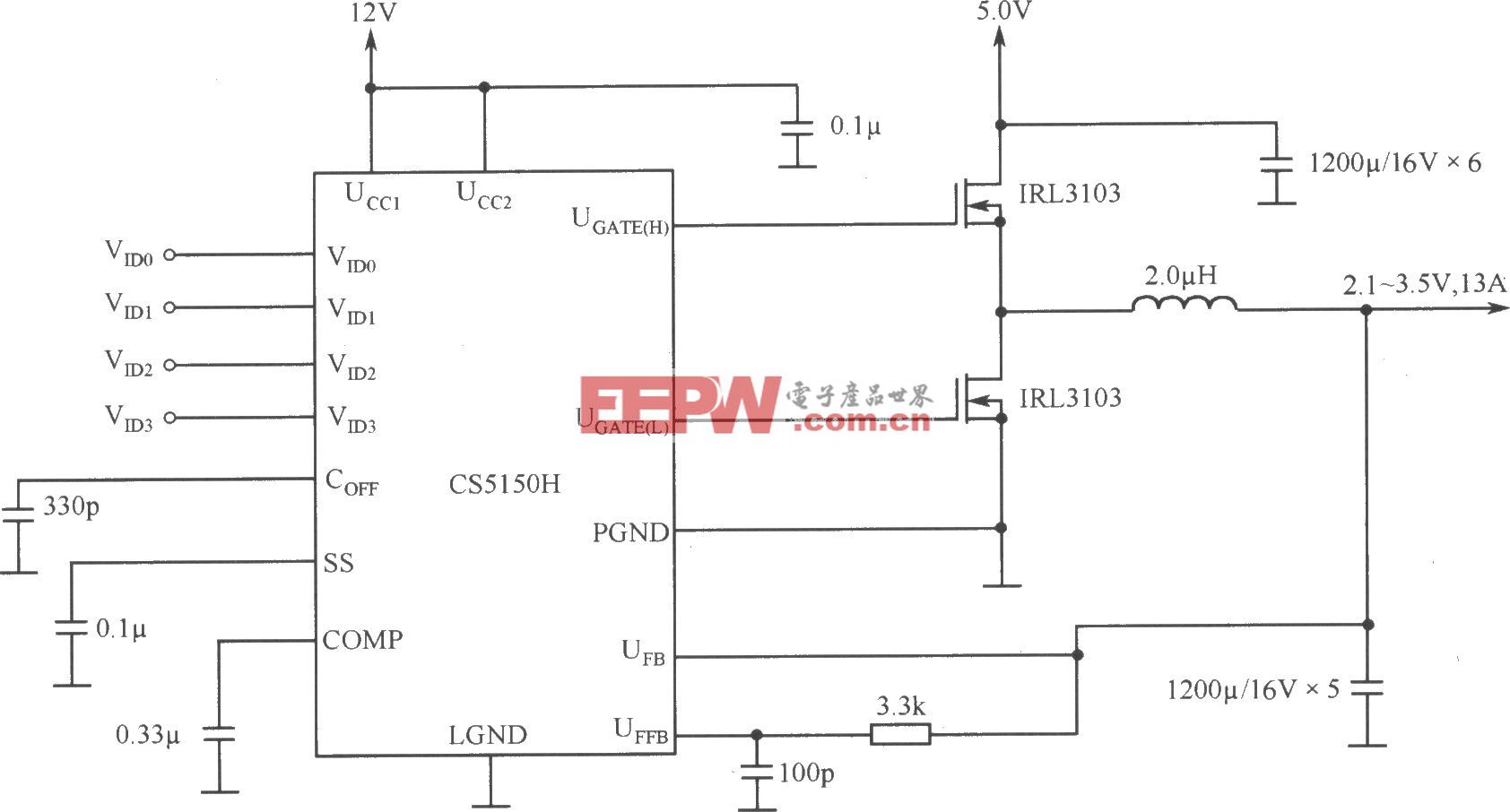
在設計電源電路時.需要考慮電源的負載能力、可靠性和穩定性。同時需要考慮系統需要多少種電源.ADSP-BF56l外部I/O供電電壓為3.3V.內核供電電壓為1.2V.因此系統需要+5V、+3.3V、+1.2V.首先通過DC-DC2405把車上的+24v轉換成+5V.然后通過LT1765把+5V轉換成+3.3V.ADP3336把+3.3v轉換成+1.2v。復位電路采用ADM708復位芯片.并在電路中加入手動按鈕。實現手動復位功能.方便程序的調試。
2.2時鐘電路









評論