駕駛員輔助系統-自適應巡航控制系統

我們可以根據先前計算結果和移動連續性來預測目標的可能位置,然后利用這項信息檢查頻率匹配的真實性,再將虛假目標排除。最后,我們要將已探測目標的參數儲存起來,提供給下次計算使用。
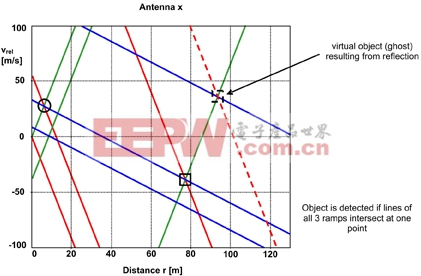
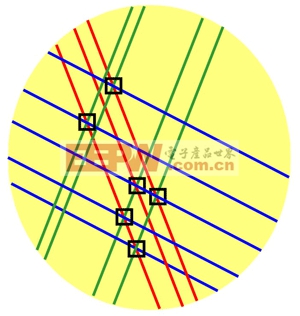
發射信號通常會被目標上的多個點反射回來(例如后車窗、行李箱和車輪等)。這一現象尤其會體現在卡車之類結構非常明顯的目標上,它們會在速度/距離圖上產生多個很靠近的交叉點(如圖所示)。
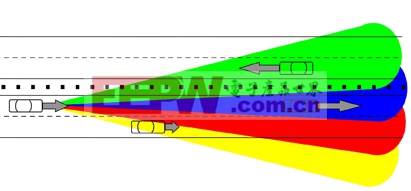
若使用多組接收天線,除了距離和相對速度之外,我們還能計算出目標與車輛縱軸之間的夾角,從而確認目標與汽車間的相對位置。下圖為采用4組重疊電波接收天線的自適應巡航控制系統的探測區。
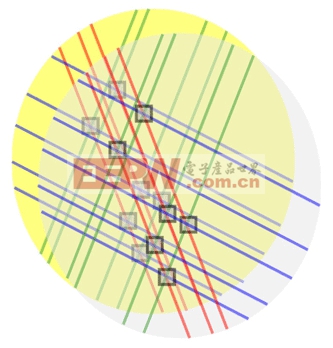
采用多組接收天線會使每個目標在速度/距離圖上出現多個交叉點,這與目標有多個反射點是類似的。下面是使用兩組接收天線所得到的詳細速度/距離圖。為了在預測位置時,將所需的運算和記憶空間減至最少,我們必須把這些探測點對應到同一個目標。
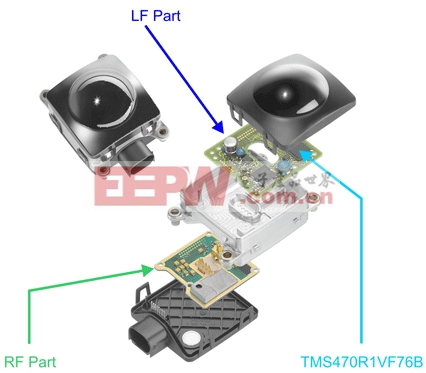
ACC系統——Bosch LRR2
許多高級汽車早已提供自適應巡航控制系統,或至少將其作為選購配備。隨著技術的進步,性價比越來越具有吸引力,運算性能大幅提升,實際器件的體積越來越少。
德州儀器的TMS470R1VF76B微控制器內含兩個中央處理器,使單芯片組件具有高效的運算功能。因此,信號處理的零件數目得到大幅減少,整個系統的體積也更為精巧。這樣一來,我們只需兩張小型電路板就能組成完整系統:其中之一是射頻單元(雷達傳感器、耿氏壓控振蕩器和前置放大器);另一是低頻單元(電源、DSP和汽車網絡接口)。Robert Bosch公司的LRR2自適應巡航控制系統將體積縮小為73×70×60mm(內部2.9×2.8×2.4英寸),使其能安裝于車輛前端任何位置。
未來的自適應巡航控制系統將提供更理想的性價比,同時增加更多新功能(如StopGo和盲點探測等),并采用其它類型的傳感器,使中價位的汽車或小型車都能享受這項先進科技帶來的諸多好處。


評論