駕駛員輔助系統-自適應巡航控制系統

當c=光速
![]()
本文的另一部分討論ACC系統的硬件和軟件實現,以及雷達功能和算法。
本文談論的是ACC系統的硬件和軟件實現,以及雷達功能和算法。它的第一部分討論了 “環車感應系統”和作為全天候ACC系統基礎的調頻連續波(FMCM)雷達系統。
ACC系統如何運作——硬件系統
耿氏壓控振蕩器(Gunn VCO)常被用來產生非常高頻率的發射信號。如果將發射天線與接收天線結合在一起,發射信號就會通過環行器(見圖1)與接收信號一起被多路復用。接收信號會與當前發射信號結合在一起產生中頻信號。由于中頻信號頻率比發射信號和接收信號頻率低得多,因此它的取樣值非常適合傳給數字處理器作進一步的處理。
ACC雷達傳感器雖然是在高頻范圍(射頻,RF)內操作,其計算距離和相對速度的信號處理卻是在低頻(LF)中進行。圖2為ACC系統的功能方塊圖。RF部分(左)由耿氏控制電路、耿氏振蕩器、混頻器和前置放大器組成;LF部分則包含模擬數字轉換器、信號處理和系統控制組件,以及電源供應和汽車網絡接口。
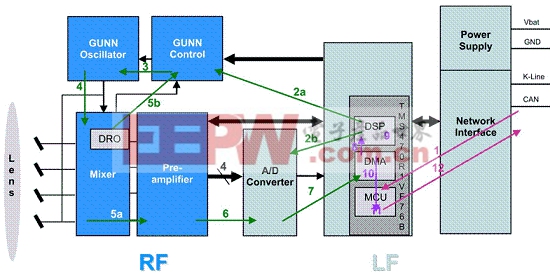
微控制器(德州儀器的TMS470R1VF76B)內含兩個中央處理器,分別為ARM7 RISC(微型處理器,MCU)和16位C54 x定點數字處理器(DSP),因此最適合需要同時執行控制任務和高效能數字信號運算的應用。用直接內存存取(DMA)可以加快兩個處理器、各種外圍接口和內存之間的數據傳輸速度。TMS470R1VF76B完全符合汽車應用需求,是適應ACC系統最理想的微控制器。圖3是微控制器在ACC系統應用中的典型功能方塊圖。
ACC系統軟件
除普通的診斷任務之外,ACC系統還會執行許多系統工作,其順序如功能方塊圖所示。
1. 讀取通過人機接口進入的控制參數默認值(速度、時間間隔)以及傳感器根據目前車況所探測到的參數(轉向角、輪速和偏航率等);
2. a)設定發射頻率的斜波參數(開始頻率,停止頻率和斜波時間);
b)設定模擬數字轉換器(轉換速率,樣本數目);
3. 設定發射頻率,啟動耿氏振蕩器;
4. 產生發射信號;
5. a)將發射信號透過所有天線同時發射出去,并將發射信號與接收信號混頻產生中頻信號;
b)用于耿氏控制的控制回路;
6.中頻信號的濾波與放大;
7.中頻信號取樣;
8.透過DMA將取樣值傳給DSP;
9.執行數字信號處理(調頻連續波(FMCW)雷達任務的第一部分)
10.交換DSP計算數據;
11.執行數字信號處理(FMCW雷達任務的第二部分)
12.通過汽車網絡(如CAN總線)與電子控制單元(ECU)的通信來調整速度或距離。
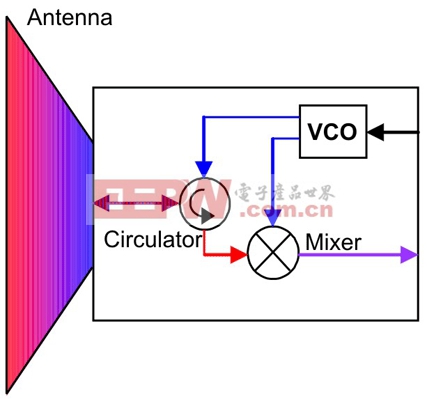
圖1
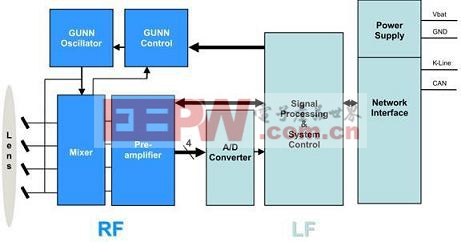
圖2

圖3
功能方塊圖
FMCW雷達能探測出可能對車速和車距造成影響的目標。如下圖所示,這些雷達任務可分為兩大類,第一類的頻譜分析、峰值探測和角度測量的運算量都非常大,較適合由DSP執行;另一類的頻率調制、位置預測、頻率匹配、位置追蹤和群濾波都是較為簡單的運算或控制功能,因此通常是由微控制處理器負責。此處為優化數據流,所以處理器工作的分配略有不同。


評論