駕駛員輔助系統(tǒng)-自適應巡航控制系統(tǒng)

未來的自適應巡航控制系統(tǒng)將會采用更多傳感器,因此適合繁忙的都市道路。人們還能進一步發(fā)展出ACC Stop-And-Roll(SR)和ACC Stop-And-Go(SG)等功能,讓車輛在行駛之間能夠自動停止和重新前進,這樣一來車道將變得更安全,交通流將更順暢。這些駕駛輔助系統(tǒng)的最終目標是將車身的四周360度全都納入監(jiān)測范圍,同時擴大自適應巡航控制系統(tǒng)功能以提供完整的縱向控制能力。
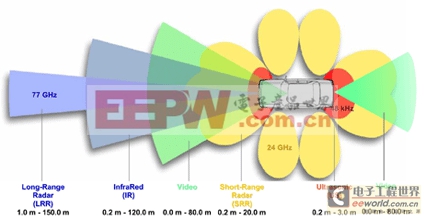
環(huán)車感應系統(tǒng)的傳感器
如上圖所示,監(jiān)測車身四周需要有一系列不同的傳感器。紅外線(IR)和長距離雷達(LRR)這兩種傳感器都很適合于ACC系統(tǒng)。紅外線傳感器可用于LIDAR(光探測和測距)系統(tǒng)中,其探測距離最遠可達120米;77 GHz長距離雷達傳感器的監(jiān)測距離可以延長到150米。與LRR傳感器相比,IR傳感器具有一個價格上的優(yōu)勢,但也有個明顯的缺點,即在惡劣氣候下(如大雨、下雪、起霧或沙塵暴等),監(jiān)測距離會大幅縮短。另一方面,雷達傳感器卻幾乎不受天氣的影響。雷達傳感器的另一個優(yōu)點是它們能被隱蔽地安裝于汽車前端,例如77 GHz雷達天線就很小,幾乎能安裝于車身的任何位置。因此,目前大多數(shù)的自適應巡航控制系統(tǒng)都采用77 GHz長距離雷達。
ACC系統(tǒng)的主要任務是在前車距離過近時將車輛減速,距離足夠遠時加速。完成此任務所需的控制參數(shù)——車速和反應時間(見下控制回路圖)是由司機通過人機界面(HMI)來設定的(見下圖2(方塊圖))。整個控制功能是由傳感器控制單元(SCU)來提供。SCU的主要功能是控制ACC系統(tǒng)的傳感器和目標識別,其控制參數(shù)計算和相關系統(tǒng)啟動則是由ACC系統(tǒng)的電子控制單元(EUU)負責執(zhí)行。
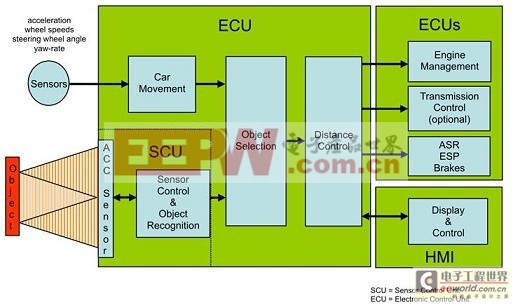
ACC系統(tǒng)傳感器的接收信號需要進一步處理。在目標識別時,系統(tǒng)會根據(jù)信號所含的信息來計算出潛在對象的距離和相對速度。車距控制需要從ACC雷達系統(tǒng)所探測的所有目標中精確地鎖定其中一個;鎖定目標時會用上車輛移動方面的信息,如加速度、車輪轉速、轉向角和偏航率。根據(jù)駕駛本身的車速和所要求的反應時間,ACC系統(tǒng)還可計算出所需的最小車距。
若在現(xiàn)行車速下計算出的車距過近,ACC系統(tǒng)就給適當?shù)南到y(tǒng)(如引擎管理,剎車系統(tǒng))送出減速命令,從而調(diào)整車距。若調(diào)整后的車距已經(jīng)足夠,車速就會被調(diào)至所需的速度。要做到這點,ACC系統(tǒng)須向相關驅動發(fā)出加速命令。若車輛無法保持最小車距,系統(tǒng)便會在人機界面上顯示所設定的反應時間和警告信號。下圖是自適應系統(tǒng)的各個元器件以及它們在車身的相對位置。


評論