ACC自適應(yīng)巡航技術(shù)的發(fā)展

巡航分為定速巡航和自適應(yīng)巡航
本文引用地址:http://www.104case.com/article/201808/385842.htm定速巡航
顧名思義,定速巡航是汽車以一定的速度巡航,不需要駕駛員進(jìn)行操作(踩油門),巡航需要一定的速度才能進(jìn)入(這個(gè)可以標(biāo)定,比如有些車車速大于50才能進(jìn)入)。進(jìn)入巡航會(huì)有一個(gè)初始速度(比如50kmh),且速度可以通過按鈕進(jìn)行調(diào)節(jié)(加,減,快加,快減),巡航的退出也有一系列的條件,比如踩剎車時(shí)就會(huì)退出巡航,汽車本身狀態(tài)不合適(有部件出問題)也會(huì)退出巡航。
定速巡航相對來說比較簡單(其實(shí)邏輯挺復(fù)雜),只是沒有復(fù)雜的傳感器,處理器等等。
定速巡航只適用于路況較好的情況下,比如高速,車少路況。
自適應(yīng)巡航(ACC)比較智能,且一般在較低的速度下即能進(jìn)入巡航,除了高速路況,也能適用于城市路況,走走停停的路都可以。
汽車的傳感器(雷達(dá))會(huì)根據(jù)前車以及本車的行駛狀態(tài)(車距和速度),經(jīng)過ECU的計(jì)算判斷后,向執(zhí)行器(節(jié)氣門,制動(dòng),檔位)發(fā)送指令,以決定自己的行駛狀態(tài),是加速還是減速,還是退出巡航。
自適應(yīng)巡航最基本功能是保持車輛縱向行駛,在有碰撞危險(xiǎn)時(shí),車輛會(huì)提示駕駛員并進(jìn)行主動(dòng)制動(dòng)干預(yù)。
要說優(yōu)點(diǎn),顯然,ACC在一定程度上減輕駕駛員駕駛的疲勞。
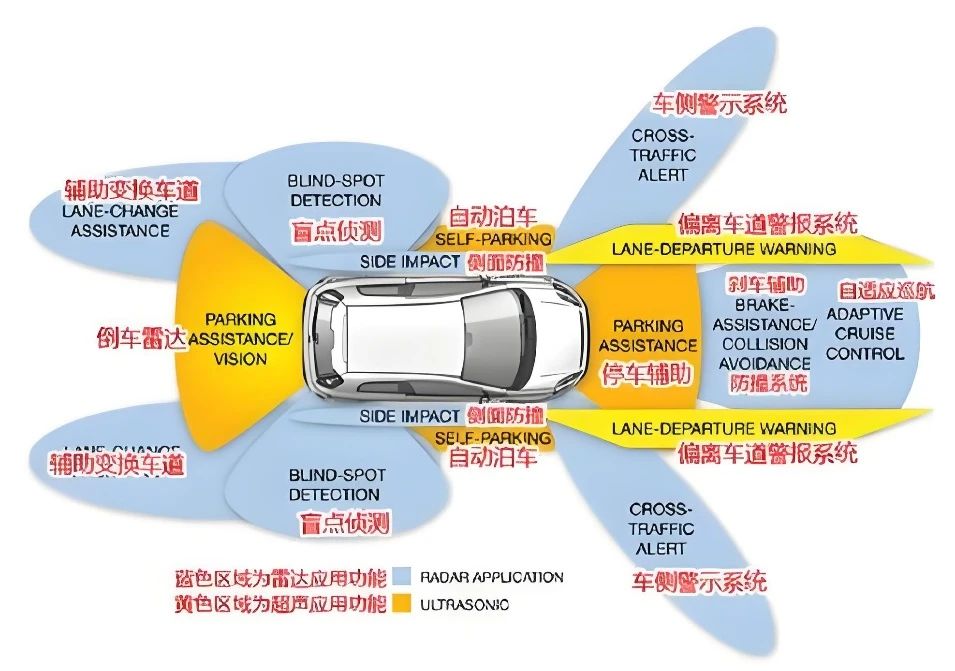
| ACC系統(tǒng)的組成
首先是傳感器,目前有雷達(dá)(長距雷達(dá)),超聲波測距傳感器,紅外測距傳感器等等。
傳感器相當(dāng)于“眼睛”。對于眼睛來說,關(guān)鍵是要識(shí)別在本車道的前車,排除旁邊車道車輛的影響。
眼睛接收到信號(hào)后,就傳遞給汽車大腦中的ACC 巡航控制系統(tǒng),該系統(tǒng)會(huì)查詢一系列規(guī)章制度,以決定汽車該怎么行駛,這些規(guī)章制度就是ACC中的控制策略。
安全車距模型(意思就是汽車跟前車保持多少距離合適)是ACC系統(tǒng)控制的主要控制策略之一;他不能過大,否則會(huì)導(dǎo)致你后頭車輛的抗議;不能過小,否則有追尾風(fēng)險(xiǎn);安全車距是最小停車距離與當(dāng)前車速的函數(shù)。
PS:安全距離,其實(shí)并不是一個(gè)固定的長度單位,而是所謂的TTC,time to collsion,即假設(shè)保持當(dāng)前相對速度,兩車發(fā)生追尾所需要的時(shí)間。
在大腦告訴了汽車該怎么做之后,接下來就是執(zhí)行機(jī)構(gòu)的事了,執(zhí)行機(jī)構(gòu)相當(dāng)于汽車的“手腳”。
執(zhí)行機(jī)構(gòu)包括節(jié)氣門,制動(dòng),檔位。通過這些機(jī)構(gòu)的動(dòng)作,對汽車進(jìn)行操控。
說缺點(diǎn)還不如談?wù)凙CC的發(fā)展。
| ACC的發(fā)展
ACC,相比于其他的汽車電子控制技術(shù),還略顯不成熟。難點(diǎn),在于對路況適應(yīng)性。
自適應(yīng)巡航作為一種駕駛輔助,畢竟不能做到像人一樣的智能,能分辨所有的路況,且做出相應(yīng)反應(yīng)。目前ACC還主要用在路況較好的道路(高速或高架),而且是主車道目標(biāo)車輛的判斷。
而對于旁車道,以及多目標(biāo)車輛的監(jiān)測;有并線意圖的車輛的預(yù)判,還做得不足。比如前車突然進(jìn)入彎道,這時(shí)本車可能會(huì)認(rèn)為安全距離過大,出現(xiàn)誤判而突然加速進(jìn)入彎道。
以下是一些典型路況的分析:
1、當(dāng)前方?jīng)]有車輛,ACC會(huì)以一定的速度巡航(巡航的車速在你設(shè)定的車速限值范圍內(nèi));
2、當(dāng)雷達(dá)監(jiān)測范圍內(nèi)出現(xiàn)車輛時(shí),如果車速過高,此時(shí)汽車會(huì)減速,并以一定的車速跟隨前車行駛,保持安全距離;若前車又切出本車道,則本車會(huì)自動(dòng)加速至設(shè)定車速。
如下圖(視頻截圖)前方車道無車,此時(shí)車速是80km/h:

下圖2,前方車道出現(xiàn)車輛,車速下降:

3、當(dāng)前車變向時(shí),汽車會(huì)更換跟車目標(biāo);
4、ACC停走功能(如果有),會(huì)在汽車低速,甚至靜止也能啟用,這點(diǎn)在走走停停的城市工況比較有用;
該系統(tǒng)在低速時(shí)仍能夠保持與前車的距離,并能夠?qū)ζ囍苿?dòng),直至靜止,在幾秒后,如果前車起動(dòng),ACC也會(huì)自動(dòng)跟隨啟動(dòng);
如果停留時(shí)間較長,只需駕駛員輕踩踏板則能夠再次進(jìn)入巡航模式。
PS: 要實(shí)現(xiàn)帶停走功能的ACC,通常還需要攝像頭的輔助,因?yàn)槔走_(dá)識(shí)別目標(biāo)的能力雖然強(qiáng),但是受到雜波干擾非常厲害,還是需要攝像頭的圖像識(shí)別功能來確認(rèn)目標(biāo)。而Mobileye公司的產(chǎn)品甚至可以只用攝像頭實(shí)現(xiàn)ACC,當(dāng)然,陰天下雨下雪估計(jì)就廢了。
同時(shí),跟車到停車以后,絕大部分廠商的策略是必須由駕駛員確認(rèn)之后才能再次起步,可以是按鍵確認(rèn),也可以是踩油門確認(rèn)。
貼圖舉例:下圖中為城市工況,此時(shí)車速25km/h:

如下圖等紅燈時(shí),汽車能自動(dòng)剎車,車速降為0,前車起動(dòng)后,本車自動(dòng)跟隨起動(dòng):

5、在進(jìn)入彎道時(shí),汽車會(huì)根據(jù)彎道的情況而調(diào)整車速。長距雷達(dá)的視野較小,彎道半徑過大可能會(huì)丟失目標(biāo),所以目前最高等級的ACC也僅對150m以上的彎道半徑做性能要求。
總結(jié): ACC作為智能駕駛技術(shù),將會(huì)是未來汽車發(fā)展方向,就像無人駕駛一樣,然而機(jī)器始終是機(jī)器,并不能完全代替人類,再智能的駕駛也只是輔助駕駛,不能完全依賴和信任。
各位老司機(jī)請清醒使用。



評論