RTK GPS定位技術(shù)在駕駛員道路考試中的應(yīng)用
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
0 引 言
本文引用地址:http://www.104case.com/article/153943.htm隨著社會(huì)進(jìn)步,機(jī)動(dòng)車(chē)保有量越來(lái)越多,汽車(chē)成了普通人的代步工具,參加駕駛員培訓(xùn)、準(zhǔn)備拿駕照的人越來(lái)越多,為規(guī)范駕駛員培訓(xùn),有必要研制開(kāi)發(fā)一種能對(duì)駕駛員的駕駛技能和安全意識(shí)進(jìn)行科學(xué)、規(guī)范測(cè)試的自動(dòng)化考評(píng)系統(tǒng)。
現(xiàn)在,駕駛員拿駕照前要通過(guò)實(shí)際道路駕駛技能考試(科目三考試),即駕駛員在考試時(shí)要駕駛考車(chē)在3~5km的實(shí)際道路上完成上車(chē)準(zhǔn)備、起步、直線(xiàn)行駛、變更車(chē)道、通過(guò)路口、通過(guò)人行橫道線(xiàn)、學(xué)校區(qū)域、通過(guò)公共汽車(chē)站、會(huì)車(chē)、超車(chē)、靠邊停車(chē)、掉頭、夜間行駛和綜合評(píng)判共計(jì)14個(gè)考試項(xiàng)目,其中需要檢測(cè)考車(chē)相對(duì)于道路邊緣線(xiàn)、道路中間線(xiàn)、路口停車(chē)線(xiàn)、車(chē)道分割線(xiàn)的距離,以及檢測(cè)直線(xiàn)行駛、掉頭等考試項(xiàng)目是否合格。
本文研制的一種駕駛員實(shí)際道路駕駛技能自動(dòng)化考試系統(tǒng)采用RTK GPS定位技術(shù),能對(duì)考車(chē)在實(shí)際道路上的位置進(jìn)行動(dòng)態(tài)定位和測(cè)距,其精度可以達(dá)到厘米級(jí),很好地滿(mǎn)足了系統(tǒng)對(duì)考車(chē)定位和測(cè)距的高精度要求。
1 載波相位實(shí)時(shí)動(dòng)態(tài)差分技術(shù)(RTK)定位原理
采用RTK GPS定位技術(shù)對(duì)考試車(chē)輛在道路上的位置進(jìn)行動(dòng)態(tài)定位,其系統(tǒng)組成通常包括三部分:基準(zhǔn)站,移動(dòng)站(考車(chē))和通信單元。基準(zhǔn)站通常設(shè)置在考試道路附近的建筑物上或路邊立桿上,移動(dòng)站安裝在考試車(chē)輛上,通信單元用于實(shí)現(xiàn)基準(zhǔn)站和移動(dòng)站之間的數(shù)據(jù)通信,如圖1所示。基準(zhǔn)站實(shí)時(shí)接收GPS衛(wèi)星信號(hào),其偽距的載波相位觀測(cè)量見(jiàn)公式(1),并將觀測(cè)量以廣播的形式發(fā)送出去;移動(dòng)站(考車(chē))實(shí)時(shí)接收GPS衛(wèi)星信號(hào),其偽距的載波相位觀測(cè)量見(jiàn)公式(2),同時(shí)接收基準(zhǔn)站發(fā)送的載波相位數(shù)據(jù),進(jìn)行組差解算,其偽距觀測(cè)方程見(jiàn)公式(3),通過(guò)計(jì)算得到厘米級(jí)的考車(chē)定位坐標(biāo)。

式中:Nir,o,Nip,o是整周模糊數(shù);Ni r,Nip是從初始?xì)v元開(kāi)始至觀測(cè)歷元間的相位整周累積數(shù);Φi r,Φip是測(cè)量相位的小數(shù)部分;λ是載波波長(zhǎng),L1載波波長(zhǎng)是19cm,L2載波波長(zhǎng)是24cm.
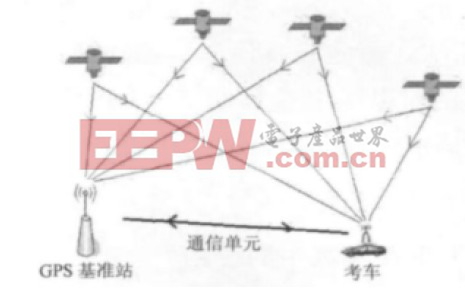
圖1 原理組成

式中:Δ-ρ是同一觀測(cè)歷元的各項(xiàng)殘差之和。
在使用RTK GPS定位技術(shù)對(duì)考車(chē)位置進(jìn)行精確測(cè)量時(shí),整周模糊數(shù)的正確求解是獲得高精度考車(chē)定位位置的必要條件。求解整周模糊數(shù)采用整數(shù)最小二乘理論,即首先利用最小二乘法求出浮點(diǎn)解,再通過(guò)快速搜索算法在整數(shù)約束條件下求出整周模糊數(shù),最后得到固定解。在本道路考試系統(tǒng)研制時(shí),為了實(shí)現(xiàn)對(duì)考車(chē)行駛過(guò)程中的實(shí)時(shí)定位,采用組合波寬巷處理技術(shù)對(duì)整周模糊數(shù)求解,工作時(shí)采用雙頻GPS接收機(jī),利用常規(guī)碼載波相位差分測(cè)量,得到一個(gè)整周模糊度的近似估值,然后對(duì)偽距噪聲及多路徑效應(yīng)進(jìn)行平滑,減少整周數(shù)的搜索個(gè)數(shù),最后根據(jù)雙頻信號(hào),通過(guò)兩種波長(zhǎng)(巷寬)的線(xiàn)性組合,可以得到一個(gè)寬巷的巷寬。
GPS的二個(gè)載波信號(hào):f1=1 575.42 MHz,波長(zhǎng)λ1=19cm;f2=1 227.60MHz,波長(zhǎng)λ2=24cm,通過(guò)公式(4)的計(jì)算得到一個(gè)寬巷波長(zhǎng)λ 寬為86cm 的巷寬。

寬巷的波長(zhǎng)比單頻的波長(zhǎng)大4倍,利用寬巷極易在估值范圍內(nèi)求出巷寬的整周模糊數(shù),再利用f1和寬巷參數(shù)間的線(xiàn)性關(guān)系求出f1和整周模糊數(shù)。該方法求解速度快,一般只需要幾秒到十幾秒就可以快速求解出整周模糊數(shù)。在本道路考試系統(tǒng)中,考車(chē)行駛時(shí)受樹(shù)木、建筑物、橋梁和山峰等障礙物影響會(huì)出現(xiàn)周跳誤差,導(dǎo)致定位精度變差,考車(chē)駛出遮擋物的影響區(qū)域后,在不到10s的時(shí)間內(nèi)就可以消除周跳誤差恢復(fù)到精確定位。
RTK GPS定位系統(tǒng)工作時(shí),基準(zhǔn)站需要把觀測(cè)得到的載波相位信息實(shí)時(shí)傳送到考車(chē)上的移動(dòng)站,為保證考車(chē)定位信息的高精度,要求數(shù)據(jù)傳送的誤碼率小于10-7,差分信息的更新時(shí)間不高于10s,這對(duì)基準(zhǔn)站和考車(chē)之間的無(wú)線(xiàn)通信單元提出了較高的要求。
本道路自動(dòng)化考試系統(tǒng)研制時(shí),利用滿(mǎn)足IEEE 802.11a/b/g協(xié)議要求的無(wú)線(xiàn)基站端、無(wú)線(xiàn)客戶(hù)端設(shè)備(AP)組建一個(gè)能在控制中心(基準(zhǔn)站)和考車(chē)(移動(dòng)站)之間實(shí)現(xiàn)音頻、視頻、數(shù)據(jù)通信的無(wú)線(xiàn)局域網(wǎng)來(lái)傳送基準(zhǔn)站觀測(cè)的載波信息到移動(dòng)站,很好地滿(mǎn)足了RTK GPS定位系統(tǒng)中對(duì)數(shù)據(jù)鏈通信的要求;該通信單元也可以利用中國(guó)聯(lián)通、中國(guó)電信提供的3G業(yè)務(wù)平臺(tái)組建一個(gè)虛擬專(zhuān)網(wǎng)(VPN)來(lái)實(shí)現(xiàn)。
2 在駕駛?cè)说缆房荚囍械?a class="contentlabel" href="http://www.104case.com/news/listbylabel/label/應(yīng)用">應(yīng)用
如此,考車(chē)P 到交通標(biāo)線(xiàn)間的距離可以通過(guò)公式(6)計(jì)算得出,進(jìn)而判斷考車(chē)在道路上是否按交規(guī)正確行駛和停車(chē),圖4給出了考車(chē)在道路上靠邊停車(chē)項(xiàng)目考試時(shí)的檢測(cè)軟件流程圖。

式中:δ1 =A1xi+B1yi+C1zi+D1,δ2 =A2xi+B2yi+C2zi+D2,n1 = {A1,B1,C1},n2 = {A2,B2,C2}.
在檢測(cè)考車(chē)與路邊緣線(xiàn)之間的距離時(shí),實(shí)際上檢測(cè)考車(chē)右前端和右后端離路邊緣線(xiàn)的距離,取其大者作為考車(chē)與路邊緣線(xiàn)間的距離。此外,為減少計(jì)算量,通常在非道路立交處,考車(chē)與道路標(biāo)線(xiàn)換算為二維平面坐標(biāo)進(jìn)行處理。
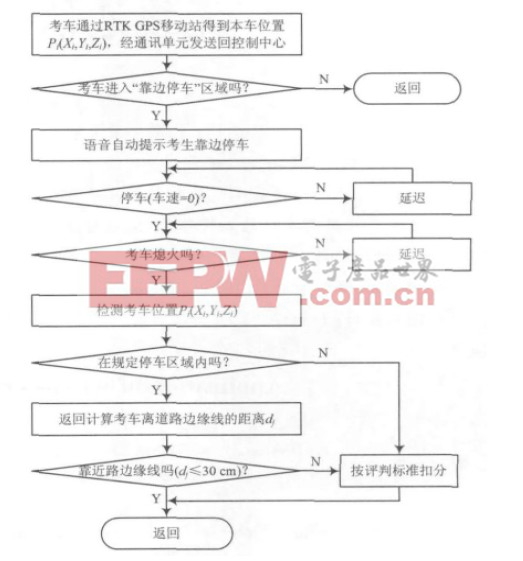
圖4 檢測(cè)靠邊停車(chē)項(xiàng)目考試軟件流程。
3 結(jié) 語(yǔ)。
RTK GPS定位技術(shù)為駕駛?cè)说缆房荚嚂r(shí)對(duì)考車(chē)位置的高精度、實(shí)時(shí)測(cè)量提供了很好的解決方案,在公安部規(guī)定的100項(xiàng)道路考試檢測(cè)項(xiàng)目中,利用RTKGPS定位技術(shù)實(shí)現(xiàn)的自動(dòng)檢測(cè)項(xiàng)目達(dá)到35項(xiàng),大大提高了整個(gè)考試系統(tǒng)的自動(dòng)化考試程度,且保證了考試要求的檢測(cè)精度和實(shí)時(shí)性要求。
采用RTK GPS定位技術(shù)研制成功的道路駕駛技能(科目三)考試系統(tǒng)減少了考試過(guò)程中人為因素對(duì)考試結(jié)果的影響,提高了道路考試評(píng)判的準(zhǔn)確性、客觀性和公正性,體現(xiàn)了考試過(guò)程的公正、公平、公開(kāi),對(duì)提高駕駛員的綜合駕駛素質(zhì)、減少道路交通事故起到了積極的推動(dòng)作用;同時(shí),道路自動(dòng)化考試系統(tǒng)的使用實(shí)現(xiàn)了考試過(guò)程的自動(dòng)評(píng)判和考試管理的計(jì)算機(jī)化、網(wǎng)絡(luò)化,極大地解放了警力,實(shí)現(xiàn)了科技強(qiáng)警。
在道路考試中需要準(zhǔn)確檢測(cè)出駕駛?cè)笋{駛的考車(chē)與道路上其他考車(chē)、路邊物體、道路邊緣線(xiàn)、道路中間線(xiàn)、路口停車(chē)線(xiàn)、車(chē)道分界線(xiàn)等之間的距離,以此判斷考車(chē)在行駛時(shí)是否與其他車(chē)輛、物體保持適當(dāng)?shù)陌踩嚯x,是否把考車(chē)停在指定區(qū)域;如此,要先確定考試區(qū)域的參考坐標(biāo)和相關(guān)的地理信息數(shù)據(jù)。
2.1 道路考試區(qū)域坐標(biāo)系的建立
以RTK GPS基準(zhǔn)站(天線(xiàn))位置作為三維坐標(biāo)系的原點(diǎn),東西向、南北向和高度分別作為x,y,z 軸,如圖2所示,把考試區(qū)域半徑(3~5km)內(nèi)的道路信息、標(biāo)志標(biāo)線(xiàn)信息、路邊物體信息通過(guò)精確測(cè)繪得到其坐標(biāo),或用相關(guān)的直線(xiàn)方程式表示,道路上的曲線(xiàn)用折線(xiàn)來(lái)近似代替。
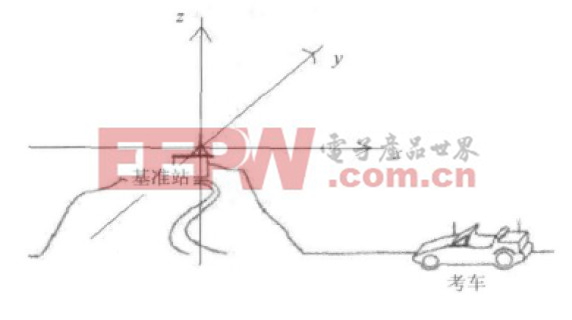
圖2 道路考試區(qū)域坐標(biāo)系。
2.2 考車(chē)之間距離的檢測(cè)
考車(chē)甲在道路上考試,其位置可以通過(guò)RTK GPS定位系統(tǒng)實(shí)時(shí)獲得,假設(shè)為P(Xi,Yi,Zi),另一在道路上考試的考車(chē)乙的位置實(shí)時(shí)檢測(cè)為Q(Xj,Yj,Zj),考車(chē)乙的位置經(jīng)考試系統(tǒng)中的通信單元傳送到考車(chē)甲,則二車(chē)之間的距離D 通過(guò)公式(5)可以計(jì)算出:

實(shí)際上,考車(chē)是用一個(gè)立方體來(lái)近似模擬的,并投影到大地平面作為一個(gè)長(zhǎng)方形來(lái)處理。RTK GPS定位系統(tǒng)得到的是安裝在考車(chē)車(chē)頂GPS天線(xiàn)的坐標(biāo),對(duì)于確定的車(chē)型可以進(jìn)一步推導(dǎo)出考車(chē)右前端(Xjrf,Yjrf,Zjrf)、右后端(Xjrb,Yjrb,Zjrb)、左前端(Xjlf,Yjlf,Zjlf)、左后端(Xjlb,Yjlb,Zjlb)四個(gè)點(diǎn)的坐標(biāo);考試時(shí),若二車(chē)同向行駛,檢測(cè)其前后端點(diǎn)之間的距離;若超車(chē),檢測(cè)超車(chē)考車(chē)右前端點(diǎn)與被超考車(chē)左后端點(diǎn)之間的距離;若二車(chē)相向行使,會(huì)車(chē)時(shí)檢測(cè)二車(chē)左前端點(diǎn)之間的距離;圖3給出了二車(chē)交會(huì)時(shí)的檢測(cè)軟件流程圖。
2.3 考車(chē)與道路標(biāo)線(xiàn)間的距離測(cè)量
考車(chē)在道路上考試,其與道路上各種交通標(biāo)線(xiàn)的位置需要實(shí)時(shí)檢測(cè)得到,以確定考車(chē)是否按規(guī)定正確行駛,考車(chē)的位置P(Xi,Yi,Zi)通過(guò)RTK GPS定位系統(tǒng)實(shí)時(shí)測(cè)得,道路上的各種交通標(biāo)線(xiàn)可以用直線(xiàn)表示,曲線(xiàn)可以用折線(xiàn)近似表示,其直線(xiàn)方程在GPS差分基準(zhǔn)站確定后通過(guò)精密測(cè)繪獲得;在空間三維坐標(biāo)系中,直線(xiàn)方程表示為:{A1x+B1y+C1z+D1=0,A2x+B2y+C2z+D2=0},若是線(xiàn)段可以加上約束條件[(x1,y1,z1),(x2,y2,z2)];直線(xiàn)方程系數(shù)A1,B1,C1,D1,A2,B2,C2,D2和開(kāi)始點(diǎn)(x1,y1,z1)、結(jié)束點(diǎn)(x2,y2,z2)坐標(biāo)通過(guò)實(shí)際測(cè)繪得到。
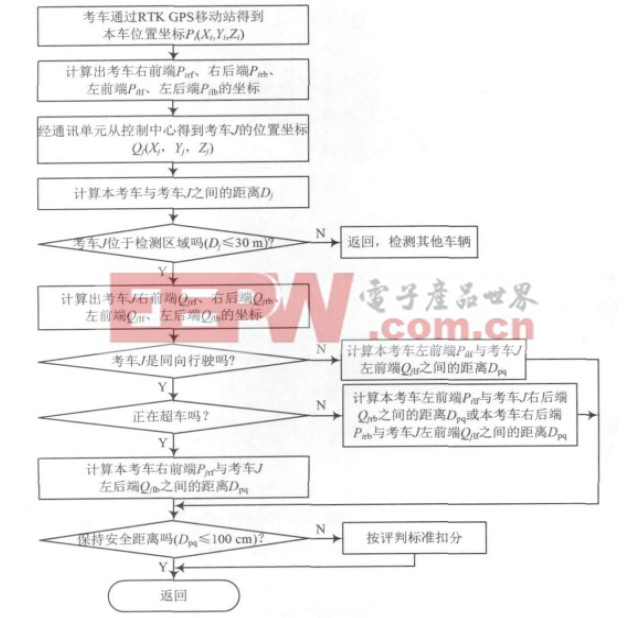
圖3 檢測(cè)二車(chē)交會(huì)過(guò)程的考試軟件流程。












評(píng)論