駕駛員輔助系統-自適應巡航控制系統

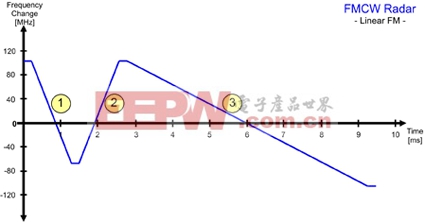
如圖所示,Robert Bosch的ACC系統目前是利用調頻方式來產生三種線性頻率斜波,其斜波時間各不相同。
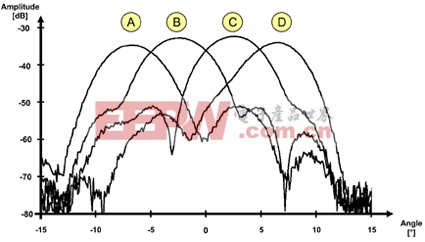
發射信號會透過四組天線(A, B, C, 和D)同時發射出去。下圖是對應的天線圖。
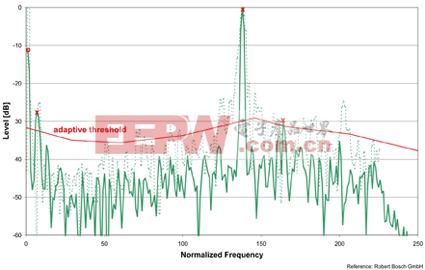
每個天線的接收信號都會與目前的發射信號混頻,以產生中頻信號。在這個例子里,系統總共會產生12個中頻信號(A1、A2、A3、B1…D3),并對這些信號進行分析以決定目標的位置。下圖是中頻信號頻譜的范例。為了消除頻譜中的噪聲,系統在執行信號處理之前會先替中頻信號設定一個自適應臨界值(Adaptive Threshold),凡是信號強度低于臨界值的頻率都會被視為噪聲,要加以濾除。在上圖的范例中,所有可能目標的旁邊都有紅色的x做標識。由于與零頻接近的峰值是由天線鏡面的反射所產生,因此會被排除。其它頻率值被用做進一步的處理。
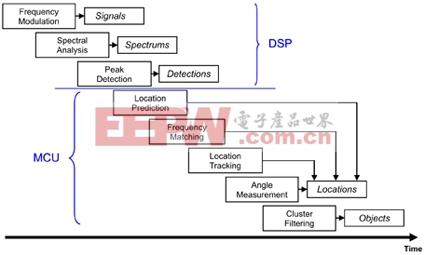
系統將12個中頻信號的噪聲消除后,就會用快速傅立葉轉換(FFT)從這些中頻信號的取樣值計算出12組頻譜;頻譜的每個頻率都代表系統所探測的一個目標,它也對應于中頻信號頻譜經過噪聲濾波后剩下的峰值信號。我們可以根據調頻連續波雷達方程式,
![]()
在速度/距離圖中為頻譜的每個頻率指定一條直線。下圖又一次表示出了它們的關聯性。
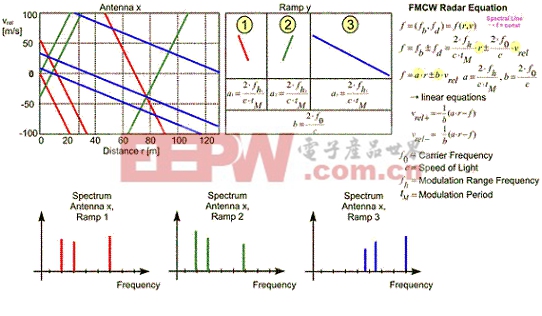
要確認系統是否探測到任何目標,我們必須以天線頻譜做為參考比較。如果3個頻率斜波所得到的直線都相交于速度/距離圖(見下圖)上的同一點,我們就可以認定目標已被系統所探測,然而這種方法有時會得到俗稱“鬼影信號”的虛假目標。


評論