基于汽車電子控制器的模態仿真技術研究


表1 各部件的材料參數
3.5仿真分析結果
利用Abaqus軟件對該汽車電子控制器進行約束模態分析,得到的前三階模態頻率和模態振型如圖9、圖10、圖11所示。第一階固有頻率為172Hz,第一階振型為控制器沿兩個安裝耳中心點連線的前后振動;第二階固有頻率為262Hz,第二階振型為控制器殼體上下面的相向的凸凹振動;第三階固有頻率為293Hz,第三階振型為控制器殼體上下面的相對的凸凹振動。
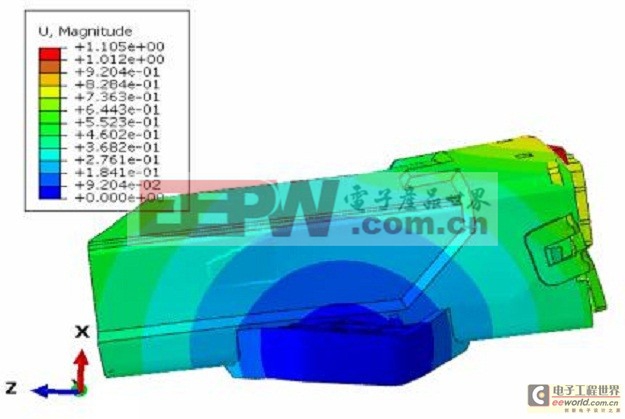
圖9 第一階頻率:172Hz

圖10 第二階頻率:262Hz
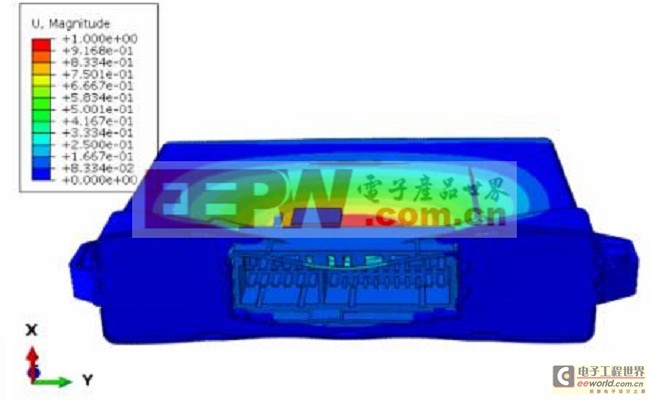
圖11 第三階頻率:293Hz
4 模態實驗過程及結果
4.1模態試驗過程
利用美國PCB公司的壓電式力錘和壓電式加速度計進行激勵、拾振。然后用LMS TEST.LAB 試驗采集分析系統進行數據采集和分析。試驗設置為,采樣頻率為2048Hz,采樣帶寬為1024Hz,頻率分辨率為0.125Hz,激勵用力窗,響應是指數窗。
汽車電子控制器通過兩個安裝孔固定在基頻大于500Hz試驗臺上。采用了5傳感器布置方案(圖12)進行模型試驗。參照仿真分析結果發現,該傳感器布置方案漏掉了第一階扭轉模態。而采用8傳感器的布置方案(圖13)能測得第一階扭轉模態。

圖12 傳感器的布置方案
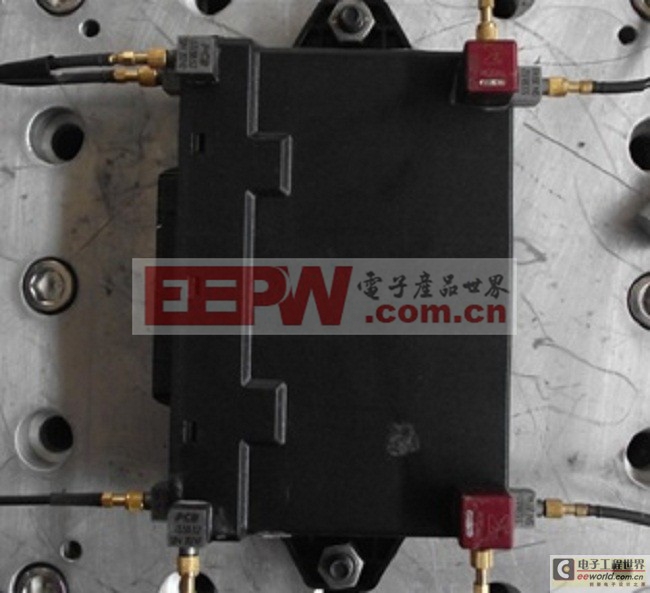
圖13 8傳感器的布置方案
4.2典型的實驗結果
在5傳感器的試驗中,若干點的頻率響應函數如圖14所示。隨意選取一個測試點的相干函數如圖15所示。在有效帶寬的范圍內,相干函數接近1,可以判定頻率響應函數的可信度比較高。在8傳感器的試驗中,若干點的頻率響應函數如圖16所示。
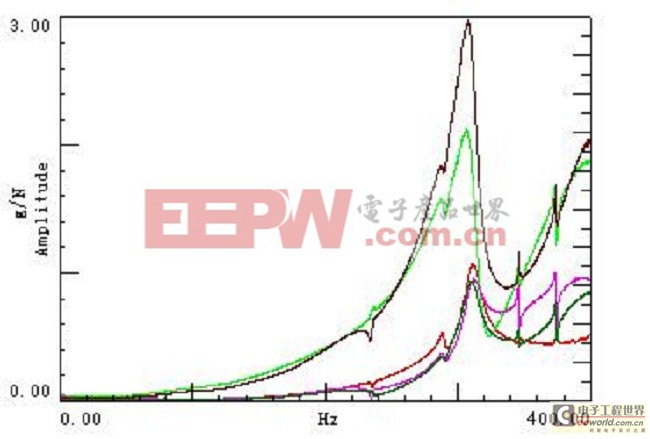
圖14 若干點的頻響函數
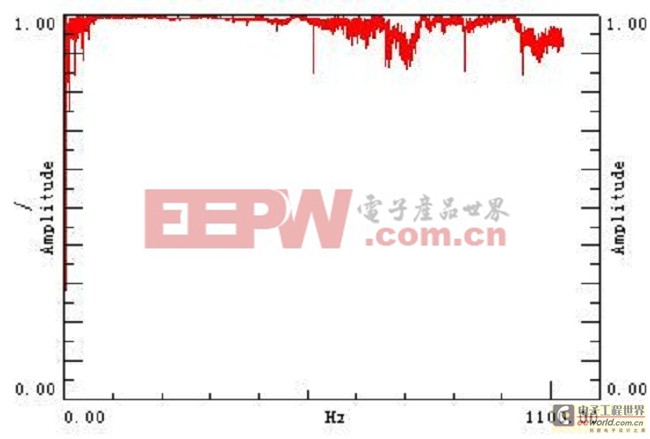
圖15 典型相干函數
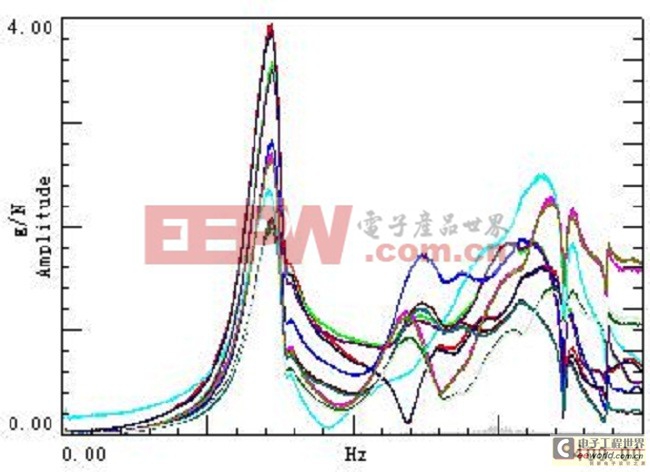
圖16 若干點的頻響函數
利用LMS TEST.LAB軟件中的Time MDOF方法進行模態參數分析。根據所有測試點的頻率響應函數之和建立穩態圖,然后判定真實的模態頻率、阻尼和參預因子。利用該方法測得的該控制器的前三階模態頻率和振型如圖17-19所示。
圖17 第一階模態: 146Hz
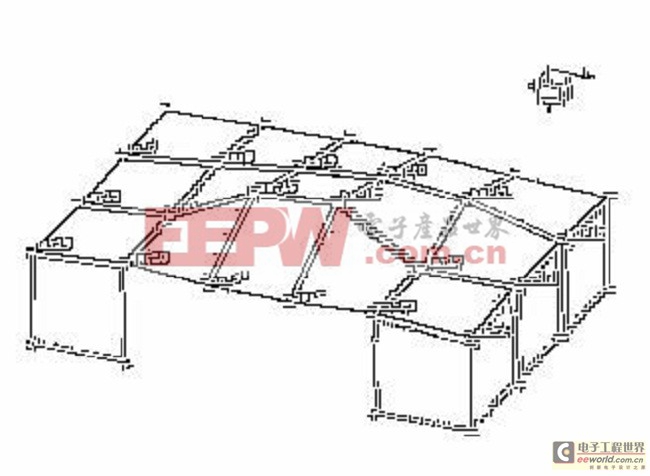
圖18 第二階模態: 236Hz
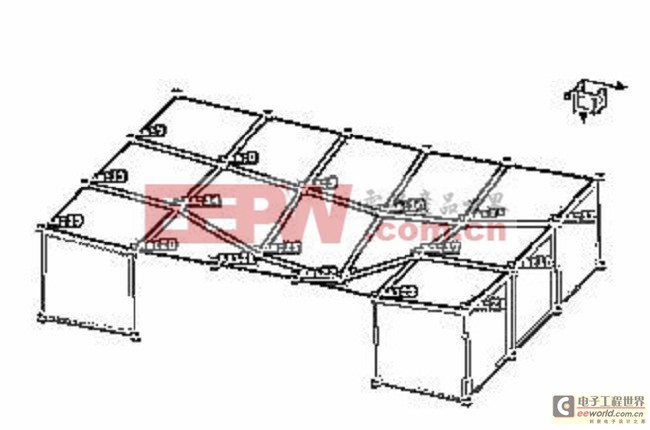
圖19 第三階模態:287Hz
5 計算和試驗結果對比及分析
5.1仿真和試驗結果對比
對比仿真分析和試驗得到的前三階振型,發現振型匹配很好;對比前三階頻率,發現最大相對誤差將近20%,如表2所示。根據以上對比結果,可以判定該試驗結果和仿真結果存在很大的誤差。為了驗證仿真分析方法是否可行,后文中將會對造成誤差的原因進行分析。






評論