自動控制系統的設計--基于根軌跡的串聯校正設計

經遲后—超前校正后,系統的開環傳遞函數為
![]()
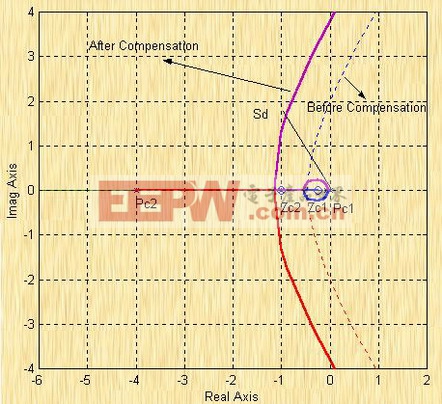
校正后系統的根軌跡如圖6-24中的虛線所示。由圖可見,校正后系統的主導極點由![]() 點移動到
點移動到 ![]() 點,相應的增益
點,相應的增益 ![]() ,靜態速度誤差系數為
,靜態速度誤差系數為
![]()
 |
| 圖6-24 |
利用Matlab進行串聯校正設計步驟,以例6-9為例,要求校正后具有下列的性能指標:阻尼比![]() ;無阻尼自然頻率
;無阻尼自然頻率 ![]() ,但對靜態誤差系統沒有要求。可按如下步驟進行:
,但對靜態誤差系統沒有要求。可按如下步驟進行:
(1) 寫出系統傳遞函數G,并畫出其根軌跡。
G0=tf(1,conv([1,1],[1,4]),0);
Rlocus(G0);hold on;[x,y]=rloc_asymp(G0);plot(x,y,’:’)
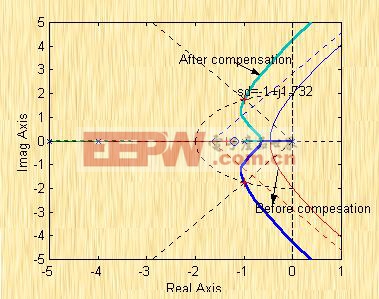
(1)根據設計要求,畫出其等ξ線和等ωn線,并由圖確定其主導極點。
Zet=[0.5];wn=[2];sgrid(zet,wn)
由圖可得到sd=-1±1.732j
(2)確定超前裝置的補償角φc,利用自編函數angle_c計算。
Fi_c=angle_c(G0,sd)
(3)確定校正器的零極點。可先選定校正器的零點zc=-1.2,然后由已知的γ、ωn、θ、φc計算極點。
Pc=find_pc(wn,zc,theta,fi_c)
(4)得到校正裝置Gc,并畫出Gc*G0的根軌跡圖。
Hold on; Rlocus(Gc*G0)
(5)從圖中交互確定在sd處對象的K值,并進而得出系統的閉環極點及階躍響應。檢驗設計效果。
[K,P]=rloc_find(Gc*G0)。
 |
| 圖6-25 |
此例完整程序見下面,設計效果見圖6-25。
G0=tf(1,[conv([1,1],[1,4]),0])
Transfer function:
1
-----------------
s^3 + 5 s^2 + 4 s
Rlocus(G0);hold on;[x,y]=rloc_asymp(G0);plot(x,y,':')
zet=[0.5];wn=[2];sgrid(zet,wn)
sd=-1+1.732j;
Fi_c=angle_c(G0,sd)
Fi_c =
60.0000
Fi_c=Fi_c*pi/180;
zc=-1.2;theta=acos(0.5);
pc=find_pc(wn,zc,theta,Fi_c);
pc =
5.0000
Gc=tf([1,-zc],[1,pc])
Transfer function:
s + 1.2
-------
s + 5
Hold on; Rlocus(Gc*G0)
[K,P]=rlocfind(Gc*G0)
Select a point in the graphics window
selected_point =
-1.0001 + 1.7315i
K =
29.9894
P =
-6.6454
-1.0001 + 1.7315i
-1.0001 - 1.7315i
-1.3543
function ang=angle_c(g,sd)
[p,z]=pzmap(g);
theta_z=0;theta_p=0;
for i=[1:1:length(z)]
theta_z=theta_z+angle(sd-z(i));
end
for i=[1:1:length(p)]
theta_p=theta_p+angle(sd-p(i));
end
ang=(-pi+theta_p-theta_z)*180/pi;end
function pc=find_pc(wn,zc,theta,fc)
gama=atan(sin(theta)/(wn/abs(zc)-cos(theta)));
pc=wn*sin(gama+fc)/sin(pi-theta-fc-gama)
6.4.4基于根軌跡的串聯校正Matlab設計
在采用根軌跡法對控制系統進行校正時,常用的函數有:
1.Rlocus: 根軌跡作圖命令;
2.Sgrid: 等ξ線和等ωn線;
3.Tf、Zpk: 求傳遞函數命令;
4.Rlocfind: 求取根軌跡上某點對應的增益K及閉環極點;
5.Rloc_asymp: 作軌跡漸近線;
6.Rltool: 由Matlab提供的根軌跡設計工具;
7.Pzmap,pole,zer 求取系統的零極點。
利用Matlab進行串聯校正設計有兩種方法:一種是利用書中介紹的步驟進行設計,另外也可以用Matlab提供的rltool可視化工具進行交互式設計。







評論