自動控制系統的設計--基于根軌跡的串聯校正設計

![]()
校正后系統的閉環傳遞函數可由Matlab中的G=feedback(Gc*G,1)得到:
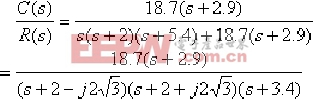
由上式可見,校正后的系統雖上升為三階系統,但由于所增加的一個閉環極點![]() 與其零點
與其零點 ![]() 靠得很近,因而這個極點對系統瞬態響應的影響就很小,從而說明了
靠得很近,因而這個極點對系統瞬態響應的影響就很小,從而說明了 ![]() 確為系統一對希望的閉環主導極點。由于本例題對系統的靜態誤差系數沒有提出具體的要求,故認為上述的設計是成功的。
確為系統一對希望的閉環主導極點。由于本例題對系統的靜態誤差系數沒有提出具體的要求,故認為上述的設計是成功的。
例6-6 設一單位反饋控制系統的開環傳遞函數為
![]()
試設計一超前校正裝置,使校正后的系統能具有下列的性能指標:超調量![]() %,調整時間
%,調整時間 ![]() 。
。
解:(1)作出校正前系統的根軌跡,如圖6—21所示。
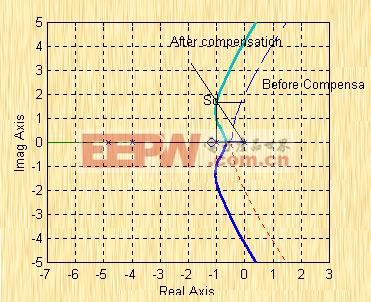 |
| 圖6-21 |
(2)根據![]() ,解得
,解得 ![]() ,考慮到非主導極點和零點對超調量的影響,取
,考慮到非主導極點和零點對超調量的影響,取 ![]() 。又由
。又由 ![]() ,求得
,求得 ![]() 。進而求得系統的一對希望的閉環主導極點
。進而求得系統的一對希望的閉環主導極點 ![]() 。
。
(3)根據求得的主導極點,計算超前校正網絡在![]() 處應提供的超前角為
處應提供的超前角為
![]()
(4)由于![]() 的開環極點正好落在希望閉環極點
的開環極點正好落在希望閉環極點 ![]() 下方的負實軸上,因此可采用第一法進行校正。把
下方的負實軸上,因此可采用第一法進行校正。把 ![]() 的零點設置在緊靠
的零點設置在緊靠 ![]() 這個開環極點的左側。如設
這個開環極點的左側。如設 ![]() ,則
,則 ![]() 的極點落在以
的極點落在以 ![]() 為頂點,向左作角
為頂點,向左作角 ![]() 的負實軸交點上,
的負實軸交點上, ![]() ,即為所求
,即為所求 ![]() 的極點。
的極點。
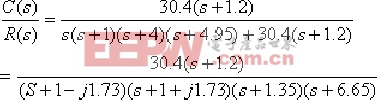
(5) 校正后系統的傳遞函數為
![]()
由根軌跡的幅值條件,求得系統工作于 點處的K值為30.4。這樣,上式便改寫為
![]()
據此,求得校正后系統的靜態速度誤差系數
![]()
如果希望![]() 值有少量地增大,則可通過適當調整
值有少量地增大,則可通過適當調整 ![]() 零點和極點的位置來實現,但這種調整有可能會破壞
零點和極點的位置來實現,但這種調整有可能會破壞 ![]() 的主導作用。
的主導作用。
(6)它的閉環傳遞函數為:
或直接由如下的Matlab命令得到:
zpk(feedback(G0*Gc,30.4))
Zero/pole/gain:
(s+1.2)
------------------------------------------
(s+6.631) (s+1.347) (s^2 + 1.972s + 4.085)
下面檢驗希望閉環極點 ![]() 是否符合主導極點的條件。不難看出,由于閉環系統的一個極點與零點靠得很近,故它對系統瞬態響應的影響很小,同時由于另一極點
是否符合主導極點的條件。不難看出,由于閉環系統的一個極點與零點靠得很近,故它對系統瞬態響應的影響很小,同時由于另一極點 ![]() 距s平面的虛軸較遠,因而這個瞬態分量不僅幅值小,而且衰減的速度也快。由此得出,上述設計的超前校正裝置能使
距s平面的虛軸較遠,因而這個瞬態分量不僅幅值小,而且衰減的速度也快。由此得出,上述設計的超前校正裝置能使 ![]() 成為系統希望的閉環主導極點。
成為系統希望的閉環主導極點。
上面兩個例題均對靜態誤差系數沒有特殊要求,否則,宜采用如下方法,即第三法。
例6-7 有一單位反饋系統,其開環傳遞函數:![]() ,設計一超前校正裝置,滿足如下性能指標:靜態誤差系數
,設計一超前校正裝置,滿足如下性能指標:靜態誤差系數 ![]() ,閉環主導極點位于:
,閉環主導極點位于: ![]() 處。
處。
解:(1)繪制未校正系統的根軌跡,并根據靜態誤差系統,確定開環增益:
![]() ,
, ![]() ,
,
(2)根據幅值確定法,并代入![]() :
:

![]()
超前校正裝置應提供的超前角度:
![]()
相關推薦技術專區 |







評論