自動控制系統的設計--基于根軌跡的串聯校正設計

校正后系統的開環傳遞函數為
![]()
相應的靜態速度誤差系數為:![]() 。
。
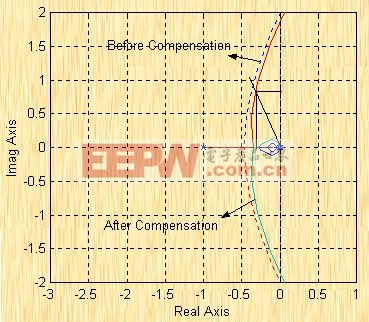
比較未校正系統和校正后系統的根軌跡可見,校正后系統的![]() 從0.8減到0.7,這意味著調整時間略有增加。如果對此不滿意,則可重新選擇希望閉環主導極點的位置,且使其
從0.8減到0.7,這意味著調整時間略有增加。如果對此不滿意,則可重新選擇希望閉環主導極點的位置,且使其 ![]() 值略高于0.8。
值略高于0.8。
 |
| 圖6-23 |
6.4.3 遲后—超前校正
由上兩節的討論可知,超前校正主要用于提高系統的穩定裕度,改善系統的動態性能,而遲后校正則可以減少系統的穩態誤差。由此設想,若把這兩種校正結合起來應用,必然會同時改善系統的動態和靜態性能,這就是遲后—超前校正的基本思路。
當希望的閉環主導極點Sd位于未校正系統根軌跡的左方時,如只用單個超前網絡對系統進行校正,雖然也能使校正后系統的根軌跡通過Sd點,但無法使系統在該點具有較大的開環增益,以滿足靜態性能的需要。對于這種情況,一般宜采用遲后—超前校正。
設遲后—超前校正裝置的傳遞函數為
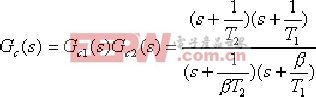 |
其中Gc1(s)起遲后校正作用,它使系統在Sd處的開環增益有較大幅度的增大,以滿足靜態性能的需要;Gc2(s)起超前校正作用,利用它所產生的相位超前角φc2使根軌跡向左傾斜,并通過希望的閉環主導極點Sd,從而改善系統的動態性能。
用根軌跡法進行遲后—超前校正的一般步驟為:
1)根據對系統性能指標的要求,確定希望閉環主導極點Sd的位置。
2)設計校正裝置的超前部分Gc2(s)。設計時要兼顧到既使Gc2(s)在Sd處產生的相位超前角φc2滿足Sd點的相角條件,又使Gc2(s)極點與零點的比值β足夠大,以滿足遲后部分使系統在Sd點的開環增益有較大幅度增大的需要。
3)根據所確定的β值,按遲后校正的設計方法去設計Gc1(s)。
4)畫出校正后系統的根軌跡。由根軌跡的幅值條件,計算系統工作在Sd處的靜態誤差系數。如果所求的值小于給定值,則需增大β值,應從步驟2)開始重新設計。
下面以實例說明這種校正的具體步驟。
例6—9 校正前該系統的開環傳遞函數為![]()
要求校正后具有下列的性能指標:阻尼比 ![]() ;無阻尼自然頻率
;無阻尼自然頻率 ![]() ;靜態速度誤差系數
;靜態速度誤差系數 ![]() 。試設計一遲后—超前校正裝置。
。試設計一遲后—超前校正裝置。
解(1)根據給定的性能指標,求出希望的閉環主導極點為
![]()
(2)設計校正裝置。超前部分![]() 在
在 ![]() 處應提供的超前角
處應提供的超前角
![]()
令![]() 的零點
的零點 ![]() ,以抵消原系統的一個開環極點。這樣設計不僅使校正后系統的階數降低,繪制根軌跡方便,而且一般易于實現希望閉環極點的主導作用。在圖6-24所示的s平面上,以
,以抵消原系統的一個開環極點。這樣設計不僅使校正后系統的階數降低,繪制根軌跡方便,而且一般易于實現希望閉環極點的主導作用。在圖6-24所示的s平面上,以 ![]() 點為頂點,點
點為頂點,點 ![]() 與-1點的連線為邊,向左作角
與-1點的連線為邊,向左作角 ![]() ,該角的另一邊與負實軸的交點
,該角的另一邊與負實軸的交點 ![]() ,這就是所求超前部分的極點。由此可見,
,這就是所求超前部分的極點。由此可見, ![]() ,
,![]() 。
。
(3)經過超前部分校正后,系統的傳遞函數為
![]()
據此,作出相應的根軌跡,如圖6-24中的實線所示。根據根軌跡的幅值條件,求得系統工作在![]() 點時的增益
點時的增益 ![]() ,對應的靜態速度誤差系數為
,對應的靜態速度誤差系數為
![]()
顯然,![]() 不能滿足給定指標的要求,所要增大的倍數
不能滿足給定指標的要求,所要增大的倍數 ![]() 應由遲后部分
應由遲后部分 ![]() 來提供。由此可見,上述確定的β=4能滿足將靜態速度誤差系數提高3.35倍的要求。
來提供。由此可見,上述確定的β=4能滿足將靜態速度誤差系數提高3.35倍的要求。
(4)設計校正裝置的遲后部分![]() 。
。
由點 ![]() 向左作一條與線段
向左作一條與線段 ![]() 成
成 ![]() 角的直線,此直線與負實軸交于
角的直線,此直線與負實軸交于 ![]() ,這就是所求
,這就是所求 ![]() 的零點,它的極點
的零點,它的極點 ![]() 。于是求得遲后部分的傳遞數為
。于是求得遲后部分的傳遞數為
![]()







評論