電動汽車動力總成控制系統方案詳解

長期以來,諸如永磁同步電機(PMSM)和感應電機等三相交流電機,被廣泛地應用于工業控制系統。在汽車應用領域,這些電機還是相對時新的裝置,目前正被逐漸用作傳統內燃機的補充品或替代品。PMSM采用的繞組為三相正弦分布繞組和機械位移繞組。三相正弦波和時間位移電流可以產生旋轉磁場。這一旋轉磁場使電機轉動,通過(逆變器中的)MOSFET切換電機繞組的電流而產生。磁場定向控制(FOC)算法為電機電流控制生成PWM模式。轉子的位置和電流持續不斷地被檢測。基于高性能微控制器的高效FOC系統,為電動汽車和混合動力汽車驅動提供安全高效的解決方案創造了條件(圖1)。
本文引用地址:http://www.104case.com/article/201710/368452.htm 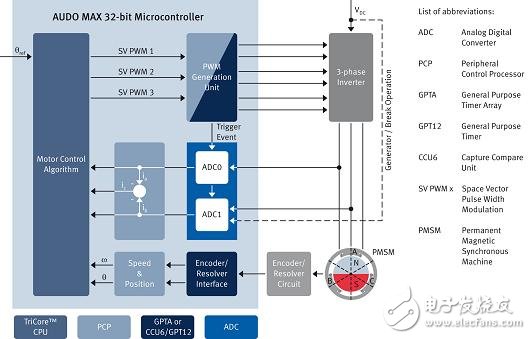
圖1:運行于FOC模式的32位TriCore微控制器。
AUDO MAX產品系列的PWM生成方式
英飛凌的32位AUDO MAX系列微控制器內裝一枚主內核(TriCore CPU,淺綠色)和一枚快速協處理器(被稱為PCP,深綠色)。這種非對稱架構能夠利用PCP高效處理外圍設備,而無需中斷在TriCore CPU上運行主算法的處理進程。PCP負責處理關鍵的實時中斷負荷,因此可減輕CPU的負擔。
有兩種方案可以生成驅動逆變器的PWM.GPTA可生成非常復雜的PWM模式,例如非對稱死區時間生成或定制模式。外設模塊 CCU6是一個低端方案,可用于生成中心對齊和邊緣對齊的PWM模式。相比GPTA而言,CCU6可以以較低的軟件開銷直接支持PWM信號生成,同時,無需配置多個定時器單元。
CCU6和GPTA這兩個模塊都具備觸發功能,能夠讓PWM信號和A/D電流測量實現無延遲的等時同步(參見箭頭“觸發事件”)。作為一個附加的安全特性,每個GPTA模塊都配有“緊急模式停止信號”,可用于設置安全開關。針對TriCore AUDO MAX微控制器系列的所有成員,提供了一個基于PRO-SIL的安全平臺,它包含硬件(安全看門狗CIC61508)和軟件(SafeTcore驅動程序),可滿足ASIL認證的B級至D級要求。
通過模數轉換器(ADC)測量電流
圖1所給示例對電機的兩個相電流進行了測量,并采用了一個模數轉換器對其進行轉換。基于逐次逼近寄存器(SAR),該模數轉換器具備很高的精度(12位分辨率),并且轉換時間小于1微秒。由兩個已知的相電流可以計算出第三個相電流。針對更高的安全要求,建議對電機的第三個相電流進行額外的測量。針對這一應用,帶有第三個模數轉換模塊的微控制器可供選擇。
連接旋轉變壓器和編碼器
旋轉變壓器將PMSM轉子的角位移轉換為一個電氣值。一般情況下,可利用一個附加的正切函數電路從兩個信號(正弦/余弦)導出轉子的角度值。旋轉變壓器電路的信號輸出至SPI總線,也可由微控制器直接讀取旋轉變壓器的正弦和余弦信號。還有一種可選的方式是讀取編碼器信號,在運行于微控制器GPT12的編碼器接口中對其進行調理,再反饋到控制算法。
AUTOSAR之外重復利用汽車電子軟件
近年來,汽車電子軟件和通信已通過OSEK、AUTOSAR、FlexRay等規范而標準化。除標準化軟件成分以外,汽車電子系統還使用了可在多種應用中被重復利用的控制算法。如今,電機控制由分布在汽車車身、底盤和動力總成系統各處的電子控制單元(ECU)來完成。MC-ISAR eMotor驅動程序提取了三相電機應用中電流控制的一般特性,設計用于支持多種位置信息采集模式和逆變器控制裝置。
三相電機控制
英飛凌AUDO MAX系列非常適用于電機的控制。TriCore架構和MC-ISAR eMotor驅動程序可采用高級控制策略控制多臺三相電機,包括無刷直流電機(BLDC)塊交換(block commutation,BC)及永磁同步電機(PMSM)磁場定向控制(FOC)。單一微控制器甚至還能同時支持BLDC和PMSM電機控制。相比于其他類型的電機而言,采用FOC控制的PMSM電機能效更高、磨損更小,并且可以實現精確控制和定位。特別是,這種電機支持線性轉矩控制,為將其用于混合電動汽車動力總成系統奠定了基礎。
圖2顯示了MC-ISAR eMotor驅動程序的電流控制環路,右側為復雜設備驅動(CDD)。這個時間關鍵型電流控制環路在中斷上下文中進行處理,處理時間不超過50微秒。左側是附加的用于位置和轉速控制的軟件成分(SWC),由應用程序提供。

圖2:電機控制中的電流控制環。
位置檢測和電流檢測模式
為符合精確定位的要求,MC-ISAR eMotor通過采用霍爾傳感器外加增量編碼器和旋轉變壓器,實現了典型高分辨率檢測模式。此外,還可將無傳感器FOC用于故障安全模式。對于成本敏感的應用,AUDO MAX系列支持直接旋轉變壓器模式,該模式通過軟件和分立元器件實現,避免了配備外置旋轉變壓器IC的需要,這能使每個控制單元在成本上降低2美元左右。與此同時,MC-ISAR eMotor可以支持兩相或直流母線電流測量模式(圖3)。
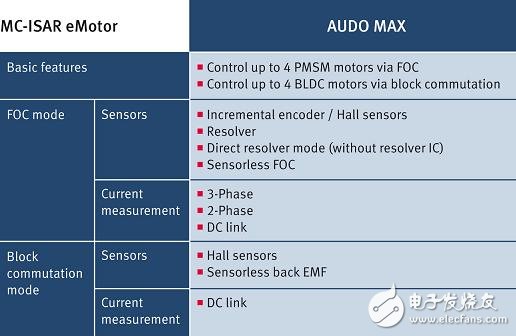
圖3:MC-ISAR eMotor操作模式。
MC-ISAR eMotor軟件劃分
此軟件可劃分為兩個組成部分:不依賴于硬件和依賴于硬件的成分。不依賴于硬件的模塊用于EmoControl、位置信息采集 PA和FOC(圖4)。因此,EmoControl是通過FOC控制方向和電流的主要模塊。送入電機的電流決定了轉矩。MC-ISAR eMotor驅動向應用程序反饋電機位置和轉速信息。位置信息采集PA模塊負責從旋轉變壓器和編碼器信號中提取角度信息。具備Park-Clarke變換和空間矢量調制(SVM)的FOC,是通過檢測給定電流和位置來設置新電流的主要部分。
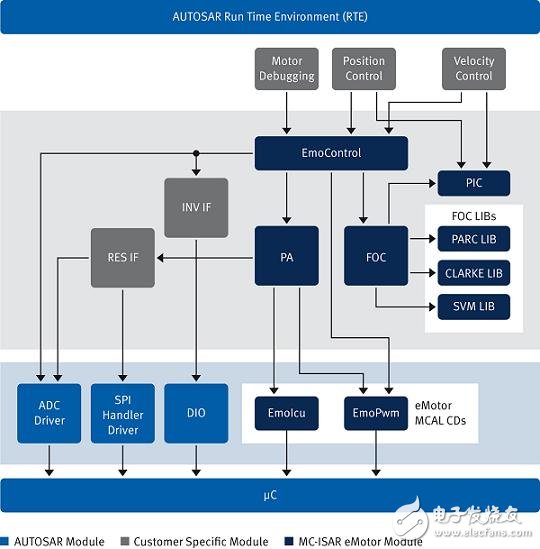
圖4:磁場定向控制(FOC)模塊框圖。
硬件相關的模塊,包括重復使用的AUTOSAR MCAL驅動(ADC、SPI、DIO),或PWM信號生成(EmoPwm驅動CCU6)和編碼器接口EmoIcu(通過GPT12讀取編碼信號)的專用模塊。客戶編寫的位置和轉速控制代碼,可以按標準軟件成分(SW-C)添加,就像AUTOSAR所提供的一樣。
MC-ISAR eMotor安全考慮
為支持符合安全要求的應用,從一開始設計軟件成分時就考慮安全要求非常重要。在ECU的開發階段應明確應用的特定需求,并且,這些需求將隨應用的不同而不同。此外,為支持安全應用,還應考慮現成電機驅動的某些安全因素。MC-ISAR eMotor采用符合ISO26262的軟件開發流程開發而成,并可支持安全相關系統中的三相電流測量。
英飛凌eMotor主要優勢概述
英飛凌AUDO MAX系列和MC-ISAR eMotor驅動,可并行控制多達4臺PMSM或BLDC電機,同時還能滿足應用任務控制所需的性能。MC-ISAR eMotor和標準AUTOSAR MCAL驅動由同一配置工具整合,因此,用戶可在同一界面中為AUTOSAR MCAL和MC-ISAR eMotor驅動配置微控制器資源,為無縫配置不同軟件模塊創造了條件。汽車ECU開發人員可專注于電機的應用相關控制,而無需改編電機的控制算法。為降低系統成本,AUDO MAX系列還支持直接旋轉變壓器模式,免除了加裝旋轉變壓器IC的需要。AUDO MAX系列和MC-ISAR eMotor驅動被設計用于支持安全應用。






評論