Freescale 汽車電子MC9S12G系列方案

簡(jiǎn)介:
本文引用地址:http://www.104case.com/article/201610/309813.htmMC9S12G系列是經(jīng)過(guò)優(yōu)化的汽車級(jí)16位微控制器產(chǎn)品線,具有低成本、高性能、引腳數(shù)量少的顯著特點(diǎn)。MC9S12G系列適合需要CAN或LIN/SAE J2602通信的一般汽車應(yīng)用。
基本特性:
MC9S12G系列具有16位MCU的所有優(yōu)點(diǎn)和功效,同時(shí)保留了飛思卡爾現(xiàn)有8位和16位MCU系列用戶所享有的低成本、低功耗、電磁兼容性(EMC)以及代碼效率等優(yōu)勢(shì)。
MC9S12G128/96和MC9S12GN32/16是MC9S12G系列在市場(chǎng)上最先推出的四款主要主品。
特點(diǎn)包括:
S12 CPU內(nèi)核,25MHz總線
高達(dá)240 KB帶糾錯(cuò)碼(ECC)的片上閃存,
高達(dá)4 KB 帶糾錯(cuò)碼(ECC)的 EEPROM,
高達(dá)11 KB片上SRAM
一個(gè)多層擴(kuò)展控制器局域網(wǎng)(MSCAN)模塊(支持CAN協(xié)議 2.0A/B)
三個(gè)串行通信接口(SCI)模塊用以支持LIN通信,以及三個(gè)串行外設(shè)接口(SPI)模塊
精密固定電壓參考用于ADC轉(zhuǎn)換
1 MHz內(nèi)部振蕩器
片上穩(wěn)壓器調(diào)節(jié)輸入電源和所有內(nèi)部電壓
方案特點(diǎn):
The MC9S12G128 Controller Board is designed to a drive 3-phase BLDC motor, enabling implementation of motor control techniques:
• Sensorless:
— Back-EMF signal sensing using an MCU ADC module
— Back-EMF zero-cross signal monitoring
• Sensor based:
— Hall sensor signal monitoring
On-board UNI-3 interface enables control of the BLDC motor power stage.
The LIN and CAN communication interfaces connect the board to the other automotive network nodes.
The USB interface is targeted at FreeMASTER PC-based application control.
The MC9S12G128 Controller Board features follows:
• MC9S12G128 microcontroller, 100 LQFP package
• BDM interface for MCU code download and debugging
• MC33905 System-basis chip (power supply, connectivity)
• Motor control interface:
— UNI-3
— MC33937A predriver
— Hall sensors
• Connectivity interface:
— LIN (MC33905)
— CAN (MC33905)
— USB interface
• LEDs:
— Power-on indicators
— Phase A, B, C PWM control signals
— Phase A, B, C zero-cross
— Hall sensor outputs
— Fault monitoring
— SBC safe mode
— User application
• Rotary encoder switch for an application control
• On-board PWM dead time generation
• MCU pins accessible via pin headers
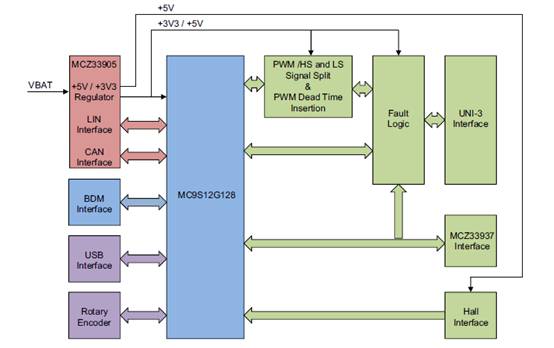
圖1 參考框圖
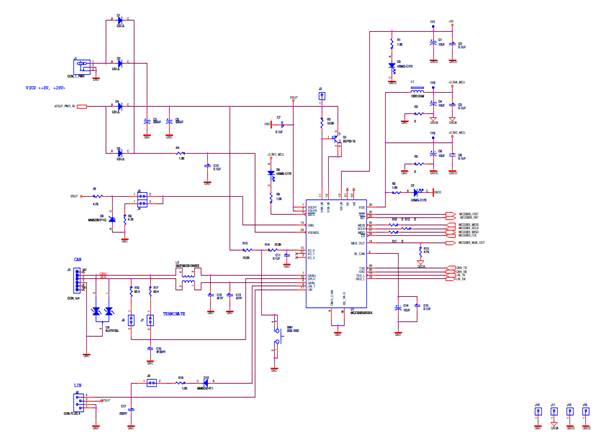
圖2 參考原理圖1
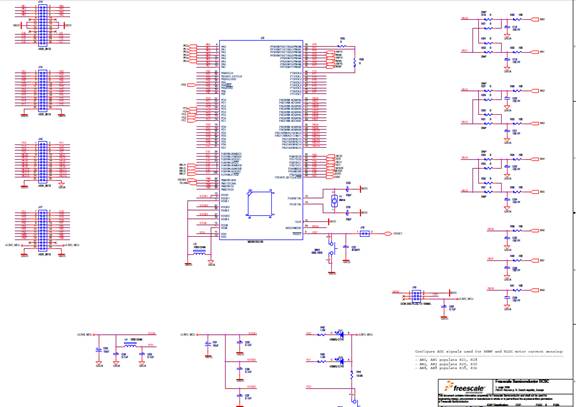
圖3: 參考原理圖2
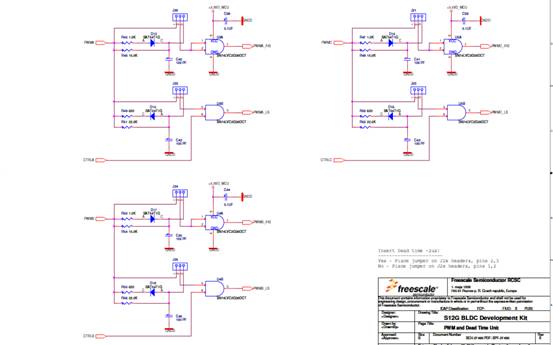
圖4: 參考原理圖3
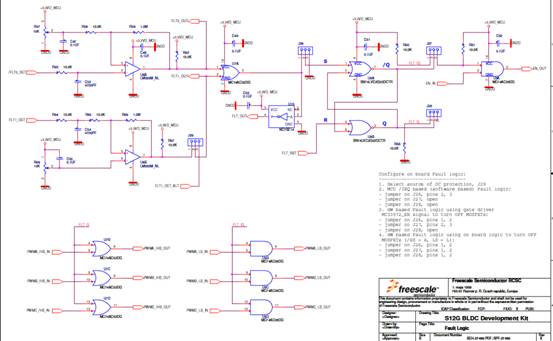
圖5 參考原理圖4






評(píng)論