汽車電子穩定系統(ESP)的原理分析

綜上所述,汽車電子穩定系統ESP在汽車出現不穩定行駛趨勢時,采用了兩種不同的控制方法,使汽車消除不穩定行駛因素,回復并保持汽車預定的行駛狀態。這兩種控制方法是,首先ESP系統通過精確地控制一個或者多個車輪的制動過程(脈沖制動),根據需要分配施加在每個車輪上的制動力,迫使汽車產生一個繞其質心轉動的旋轉力矩,同時代替駕駛員調整汽車行駛方向。其次在必要時(比如車速太快,發動機驅動轉矩過大),ESP系統自動調整發動機的輸出轉矩,控制汽車的行駛速度。
通過采取上述兩種技術措施,當汽車進行蛇形線路測試的時候就可以有效避免汽車的翻轉。ESP系統不僅僅是在干燥路面上提高了汽車的穩定性,還可以在路面附著性比較差的時候,諸如結冰、濕滑,以及碎石等情況下起作用。在上述不利狀況下,車輪與路面之問的附著力降低,即使是最好的駕駛員也很難將高速行駛的汽車保持在預定的路線上,汽車容易發生側滑和跑偏,失去方向穩定性,甚至在急轉彎的時候發生翻車事故,這時就需要ESP系統。
梅塞德斯-奔馳公司從1994年起就對ESP系統進行了適用性和可靠性的全面驗證試驗。
在微機控制系統的ROM中,預先儲存的控制程序中的標準技術數據,應該來源于大量的實車測試數據。但由于在沒有安全保障的情況下的實車試驗,有可能造成無法彌補的安全事故后果,因此標準技術數據的取得,采用了模擬器。模擬器內輸入了大量的通過實驗采集的數據,可以仿真出很多復雜的路面狀況和駕駛過程。再通過80位梅塞德斯轎車車主用模擬器進行時速為100km/h的模擬路面駕駛試驗,得到各種不同性能的汽車在各種駕駛過程中的響應。模擬器檢測手段既安全,又可以得到很多實車試驗無法測量的數據。比如,在試驗場的4個轉彎處,用模擬器模擬路面突然結冰的情況,這將使車輪和路面之間的附著力在幾米的路程內減少 70%以上。如果轎車沒有ESP系統,則78%的駕駛員不能將他們的汽車穩定在冰雪路面上,還可能遭受汽車連續3次翻轉造成的傷害。有了ESP系統,所有參加過模擬測試的駕駛員都能避免汽車翻轉事故的發生。
1995年,梅塞德斯-奔馳S級轎車開始安裝ESP系統,ESP系統突出的安全保障表現,大大降低了汽車在各種道路狀況下以及轉彎時發生翻轉的可能性。同時汽車在彎道和濕滑路面上的制動距離得到縮短,在彎道行駛加強了汽車線內行駛能力。1998年,梅塞德斯-奔馳A級微型轎車也安裝了。ESP系統,使這種采用大量高新技術開發的A級微型轎車,克服了因車身較窄,在汽車以小轉彎半徑急轉向時,容易產生側向翻轉而造成人身傷害和財產損失的缺點,成為一輛安全性能卓越的微型轎車。
目前,梅塞德斯-奔馳公司的S600、CL600、sL600、FA30、E320、4MATIC以及高性能的E55AMG和C43AMG等車型上都選配了ESP系統,2002年所有G級車上都安裝了該系統。
新一代汽車電子穩定系統將主動轉向控制系統(Active steering Control,ASC)和可選擇懸架模式的主動懸架控制系統(Active Damping Control,ADC)和ESP集成在一起,使汽車的動態穩定控制技術更加完善,提高了汽車在任何情況下的行駛穩定性和操縱穩定性。
在非危險行駛狀況下,主動轉向控制系統使駕駛更靈活,以增加駕駛樂趣。在危險行駛狀況下,主動轉向控制系統與制動系統、發動機管理系統共同控制汽車的行駛穩定性和乘坐舒適性。
5.綜合穩定控制系統
綜合穩定控制系統在任何給定的條件下,具有綜合控制車上所有的主動系統,如驅動、制動和操縱系統等功能。綜合穩定 控制系統與現行的主動車輛穩定控制系統相比,可以對汽車進行持續控制,并實現控制的個性化。
6.汽車底盤電子控制系統的發展
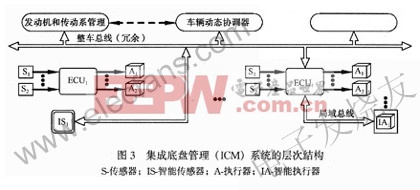
(1) 集成底盤管理系統
隨著電子技術特別是大規模集成電路和微型電子計算機技術的高速發展,汽車的電子化程度越來越高。汽車的底盤系統也改變了以往那種完全依靠液壓或氣壓執行機構來傳遞力的機械式結構,開始步入電子伺服控制(By-wire,操縱裝置與執行器之間靠電信號聯系而非機械的連接)階段,底盤綜合控制系統也已開始出現。先進的底盤電子控制系統優化了車輪與地面之間的附著狀況,顯著地改善了汽車的動力性、安全性和舒適性。
汽車底盤電子控制系統將逐步形成一個集成底盤管理(ICM)系統。該系統將集成所有的底盤電控子系統,實現各子系統問硬件、能量和信息的共享,以最大限度地獲取系統集成帶來的增效作用,提高汽車的安全性、舒適性和經濟性。圖3是ICM系統的層次結構,結構圖的上層只包含了一些關鍵的監控功能,在這一層次上系統通過一個“協調器”ECU來實現對發動機、傳動系、底盤系統等的管理。空白方塊代表其他的功能,如導航和ACC功能。結構圖的下層代表目前的電控系統,不過它 們不再是單獨工作的模塊,而是在上層單元監控、管理下協調工作。系統中的傳感器和執行器可分為兩類:傳統型和智能型。傳統型傳感器和執行器與各自的ECU之間只有直接的物理連接,而智能傳感器和執行器與ECU之間則使用總線接口來傳輸數據。一般情況下它們都具有自診斷能力和一定的傳感器信號處理能力。
(2) 動力車身控制系統(Dynamic Body Control)
對于多用途運動車(SUV)和其他質心較高的汽車,動力車身控制系統可最大程度地提高轉向穩定能力,同時汽車行駛舒適感增強。在汽車越野行駛時,車橋通過相互配合來獲得更好的牽引性能。動力車身控制系統使用1~2個主動式平衡桿模塊,通過對平衡桿施加可調節的預加載荷來防止汽車轉彎時發生左右搖晃。當汽車車身要發生傾斜時,加速度計監測到汽車側滑傾向,將信號傳到控制系統ECU,ECU指令向平衡桿執行器通入壓力油,壓力油產生力的大小根據加速度計監測到的汽車橫向加速度大小和汽車產生搖晃的時間來確定。





評論