光通信用的多路半導(dǎo)體激光器監(jiān)控系統(tǒng)研究

2.2 PI分離控制電路設(shè)計(jì)
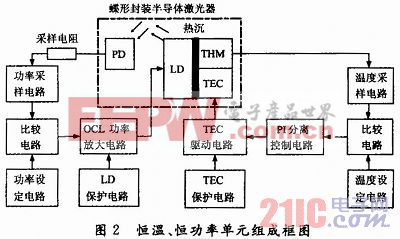
PI控制器原理簡(jiǎn)單、參數(shù)易調(diào)且實(shí)用性強(qiáng),因此應(yīng)用廣泛。本系統(tǒng)中的比例環(huán)節(jié)(P)主要是為了提高溫度響應(yīng)速度,積分環(huán)節(jié)(I)主要是為了消除靜差、提高精度,但在大幅度增減溫度設(shè)定值或外部干擾情況下,短時(shí)間內(nèi)比較電路輸出有較大的偏差,造成積分積累達(dá)到飽和,可能給恒溫單元帶來(lái)較大的超調(diào),甚至引起振蕩。
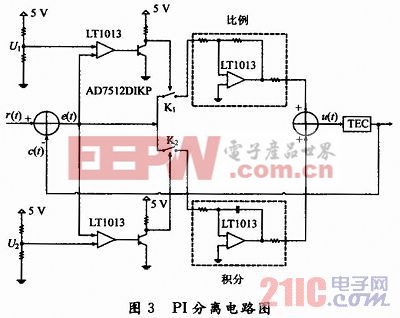
為了使溫度較快進(jìn)入高穩(wěn)定狀態(tài),本系統(tǒng)采用PI分離電路的設(shè)計(jì)思路,當(dāng)溫度設(shè)定值與實(shí)際測(cè)量溫度值偏差較大時(shí),取消積分作用,避免因積分飽和致使其控制量過(guò)大,引起超調(diào);當(dāng)偏差值較小時(shí)引入積分作用,消除靜差,可有效減小外界干擾,提高溫度穩(wěn)定性。在實(shí)際電路中采用電阻串聯(lián)分壓模式,設(shè)定兩個(gè)閾值U1和U2(U1U2),通過(guò)閾值比較電路將偏差e(t)(設(shè)定值r(t)與測(cè)量值c(t)的差值),與兩個(gè)閾值比較后,輸出兩個(gè)控制量分別控制開(kāi)關(guān)K1和K2的通斷。當(dāng)e(t)U1時(shí),取消比例作用;當(dāng)U1e(t)U2時(shí),比例積分同時(shí)作用;當(dāng)e(t)>U2時(shí),為防止積分飽和而取消積分作用。PI加和后輸出μ(t)驅(qū)動(dòng)TEC,數(shù)值為正時(shí)加熱,且數(shù)值越高加熱功率越大;為負(fù)時(shí)制冷,且絕對(duì)值越大制冷功率越大,如圖3所示。









評(píng)論