智能車高速穩定行駛局部路徑規劃算法

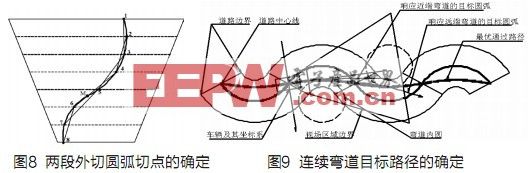
兩段外切圓弧目標轉向半徑的確定
本文引用地址:http://www.104case.com/article/109143.htm當兩段圓弧外切連接,可采用“弦線法”確定兩段圓弧的切點,如圖8,將圓弧平分為7段,分別連線13,24,35,46,57,68,則有一條弦線與圓弧相交,若沒有找到交點或找到多個交點,可將圓弧平分為更多段數進行連線,直到僅找到一個交點為止,近似認為該交點即為切點。將切點作為兩段圓弧的公用特征點,再分別從兩段圓弧上各提取兩點作為特征點,按照一段圓弧圓心位置的計算方法,可分別求出兩段圓弧的圓心位置和半徑,進而可分別計算出響應遠端圓弧的目標轉向半徑Rf和響應近端圓弧的目標轉向半徑Rn,如圖9。若響應遠端圓弧的目標圓弧與響應近端圓弧的目標圓弧彎曲方向相反,則選取Rf為目標半徑;否則,即兩者彎曲方向相同時,當Rf ≤Rn時,為保證響應近端彎道時不觸及道路邊界,選取Rn為目標半徑,當Rf>Rn時,選取Rf為目標半徑。由此可在連續彎道中規劃出一條近似最優的通過路徑。
舵機轉角和行駛速度的確定
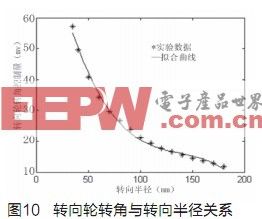
當智能車行駛速度較高且側向加速度劇烈變化時,容易出現側向附著力不足以提供車輛所需的側向力的情況。這種情況發生在前輪,會造成前輪失去轉向能力;發生在后輪,則會造成后輪側滑甚至激轉。由于在智能車實際行駛過程中發生側滑現象較多,故通過定圓周實驗可確定智能車在一系列不同轉向半徑下確保智能車不發生側滑的轉向輪轉角及最高穩定速度,并擬合出轉向輪轉角與轉向半徑及最高穩定速度與轉向半徑之間的關系曲線,如圖10、11。因此,在智能車行駛過程中通過路徑規劃計算出目標轉向半徑后,可通過查表確定期望的轉向輪轉角及最高穩定速度,并通過PID控制器對舵機和電機進行控制。
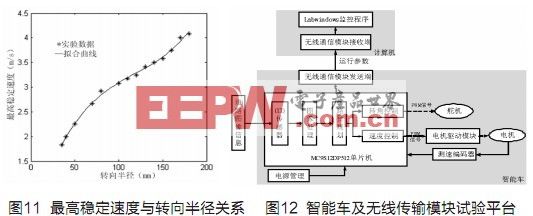
智能車及無線傳輸模塊試驗平臺
為實時監視智能車運行參數,搭建智能車及無線傳輸模塊硬件試驗平臺如圖12。試驗平臺由智能車和計算機兩部分組成,智能車是試驗平臺的主體,計算機通過虛擬儀器語言Labwindows開發的監控程序實現試驗數據的監控及顯示,兩者之間通過無線通信模塊進行數據實時傳輸。其中,智能車部分包括:①傳感器單元,由CCD傳感器,測速編碼器組成;②MC9S12DP512單片機,為智能車的控制器;③電源管理單元,為智能車各工作單元提供能源;④動作執行單元,由電機驅動模塊、電機及舵機組成⑤無線通信模塊發射端。計算機部分主要由Labwindows監控程序及無線模塊接收端組成。
實驗結果與比較
為驗證算法有效性,搭建實驗道路如圖13,分別使智能車采用傳統的跟蹤道路中心線循跡控制算法和采用路徑規劃算法由起點開始各逆時針方向行駛一周,兩者皆根據上文中標定實驗分配轉向輪轉向角和車速,并在行駛過程中通過無線傳輸模塊發送其轉向輪轉角及實時車速,并通過計算機擬合出轉向輪轉角對比曲線如圖14,車速對比曲線如圖15。實驗結果表明,在不觸及道路邊界的前提下,相比傳統的跟蹤道路中心線循跡控制算法,通過局部路徑規劃算法可以使智能車在復雜的行駛道路中平均車速提高大約40%,縮短了智能車的行駛時間;轉向輪轉角的絕對值總體上減小大約50%,降低了側向加速度劇烈變化危險工況發生的幾率,提高了智能車的高速行駛穩定性。










評論