智能車高速穩(wěn)定行駛局部路徑規(guī)劃算法
作者:趙祥磊 曹子健 吳穎熹 吉林大學(xué) 汽車工程學(xué)院 清華大學(xué) 汽車系
時(shí)間:2010-05-19
來源:電子產(chǎn)品世界
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫查詢
基于坐標(biāo)變換的偏航算法
由于從CCD傳感器采集圖像開始到單片機(jī)輸出控制量結(jié)束經(jīng)歷一定程序執(zhí)行時(shí)間,在這段時(shí)間內(nèi),智能車行駛一定距離并轉(zhuǎn)過一定角度,故為了針對(duì)當(dāng)前時(shí)刻智能車相對(duì)道路的位置及姿態(tài)輸出控制量,需將道路中心線各點(diǎn)坐標(biāo)進(jìn)行坐標(biāo)轉(zhuǎn)換,如圖4。
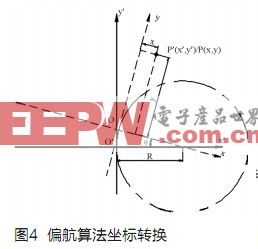
由車速,轉(zhuǎn)向半徑及程序執(zhí)行時(shí)間可求出智能車世界坐標(biāo)系在程序執(zhí)行時(shí)間內(nèi)所轉(zhuǎn)過的角度為:
式中ω為智能車瞬時(shí)角速度,t為程序執(zhí)行時(shí)間,V為智能車行駛速度,R為轉(zhuǎn)向半徑。
故新坐標(biāo)系的兩坐標(biāo)軸在原坐標(biāo)系內(nèi)方程分別為:
利用點(diǎn)到直線距離公式,可求出任意一點(diǎn)P'(x',y')坐標(biāo)轉(zhuǎn)換后的新坐標(biāo)P(x,y)。










評(píng)論