智能車高速穩定行駛局部路徑規劃算法

一段圓弧目標轉向半徑的確定
本文引用地址:http://www.104case.com/article/109143.htm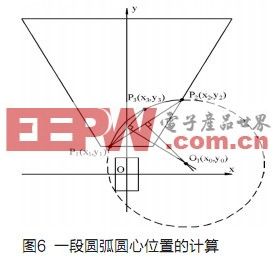
由一段圓弧上三點坐標,通過求兩條弦線中垂線交點的方法可求出圓心坐標,如圖6所示,其中P1(x1,y1),P2(x2,y2),P3(x3,y3)為經過偏航算法坐標轉換后一段圓弧上的三點,O1(x0,y0)為圓弧圓心。計算可得:
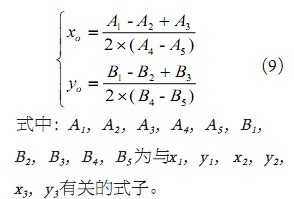
得到圓心坐標后,計算三點中任意一點與圓心的距離即為道路中心線圓弧半徑R1。同時可求出相應的與其同心且半徑為R2的一段內圓弧,保證智能車沿該段內圓弧行駛時內側車輪剛好處于不觸及道路邊界的臨界狀態,即

式中Wr為道路寬度,Wc為智能車幾何寬度。
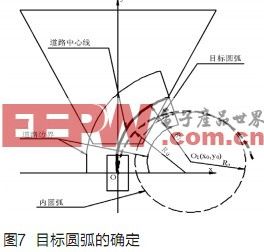
目標圓弧即為通過世界坐標系原點O且與內圓弧相內切的一段圓弧,如圖7。計算可得,目標轉向半徑R0為:
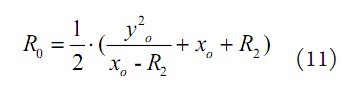
式中x0,y0為道路中心線圓弧圓心的橫坐標和縱坐標,R2為內圓弧半徑。










評論