智能車高速穩定行駛局部路徑規劃算法

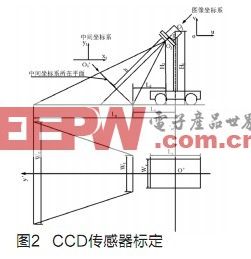
CCD傳感器標定
本文引用地址:http://www.104case.com/article/109143.htm假設道路為水平面,故在二維平面內標定CCD傳感器,從而建立CCD圖像坐標系與世界坐標系的對應關系。如圖2所示,圖像坐標系原點位于圖像左下角,坐標軸u、v分別為CCD圖像平面的橫向和縱向;世界坐標系原點O'位于智能車幾何中心,x'和y'軸分別為智能車橫向與縱向對稱面在水平面的投影線;中間坐標系原點O1'位于視場最近端中點,x1和y1軸分別為中間坐標系所在平面的橫向和縱向。圖2中各參數的物理意義與幾何尺寸數值見表1。

由于CCD攝像頭存在俯仰角以及鏡頭加工工藝和裝配精度等因素的影響,采集的圖像存在梯形和桶形失真,故基于小孔成像原理校正失真[6]:
視野同一點在圖像坐標系與中間坐標系的坐標分別為(u,v)和(x1,y1),通過實驗標定二者關系如下:
式中a1,b1為實驗標定的擬合系數;a[v-1], b[v-1], c[v-1]為實驗標定的擬合向量的第v個元素(即擬合系數)。
依據圖3所示的幾何關系,可得到坐標(x1,y1)與(x', y')的相應關系。










評論