局部路徑規(guī)劃 文章 最新資訊
智能車高速穩(wěn)定行駛局部路徑規(guī)劃算法
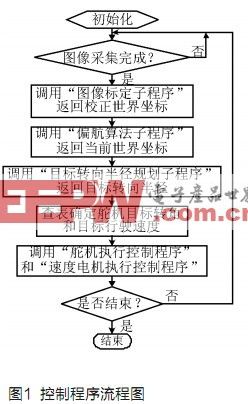
- 提出一種確保智能車高速穩(wěn)定行駛的局部路徑規(guī)劃算法。利用CCD傳感器采集道路圖像信息,綜合考慮智能車相對道路的位置和姿態(tài),彎道類型等,完成CCD傳感器圖像標定、偏航計算和路徑規(guī)劃,進而試驗標定目標轉(zhuǎn)向半徑與避免側(cè)滑的最高車速的關(guān)系以及目標轉(zhuǎn)向半徑與轉(zhuǎn)向角的關(guān)系,最終查表輸出確保智能車高速穩(wěn)定行駛的車速與轉(zhuǎn)向角。試驗結(jié)果表明:本算法能確保智能車以較高車速穩(wěn)定行駛通過規(guī)定路徑。
- 關(guān)鍵字: 智能車 傳感器 局部路徑規(guī)劃 高速 穩(wěn)定 201005
| 共1條 1/1 1 |
局部路徑規(guī)劃介紹
您好,目前還沒有人創(chuàng)建詞條局部路徑規(guī)劃!
歡迎您創(chuàng)建該詞條,闡述對局部路徑規(guī)劃的理解,并與今后在此搜索局部路徑規(guī)劃的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對局部路徑規(guī)劃的理解,并與今后在此搜索局部路徑規(guī)劃的朋友們分享。 創(chuàng)建詞條
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司