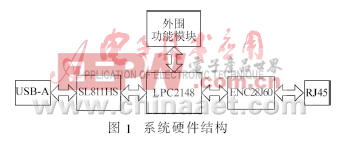
- 基于嵌入式USB的以太網應用系統設計,介紹了一種基于ARM7實現的通過以太網訪問嵌入式USB的方法。利用該方法可以通過網絡對不具備聯網功能的USB設備進行操作,達到USB設備網絡共享的目的。
- 關鍵字:
應用系統 設計 以太網 USB 嵌入式 基于 通信協議
- 摘要:設計一種基于ATmega16L單片機的溫度控制系統,闡述該系統的軟硬件設計方案。采用模塊化設計方法,利用增量式PID算法使被控對象的溫度值趨于給定值。實驗結果表明該系統具有良好的檢測和控制功能。
關鍵詞:AT
- 關鍵字:
控制系統 設計 溫度 單片機 ATmega16L 基于
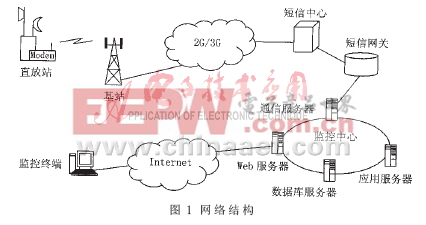
- 在直放站集中監控管理系統中引入電子地圖,可以提供更直觀的用戶界面,方便監控和操作。介紹了系統采用的分布式網絡結構、分層式通信協議結構和模塊式管理功能結構,分析和設計了基于MapXtreme的應用方案,針對開發中的關鍵問題給出了解決方法。系統的實現大大提高了運營商的資產利用率和工作效率,降低了運行維護成本。
- 關鍵字:
開發 實現 管理系統 監控 MapXtreme 集中 基于 通信協議
- 由于目前使用的射頻功率放大器(PA)缺乏高效率,為手持計算設備添加無線通信功能需要使用特殊的電源管理技術。一些通信協議允許突發傳輸技術,在沒有發射信號時關斷電源(通過占空比控制),但是在傳輸過程中PA效率的典型值卻不高于40%至60%。相反地,手持設備中的主電源效率的典型值為90%至95%。
- 關鍵字:
調制解調器 電源 無線 設備 手持 應用 通信協議
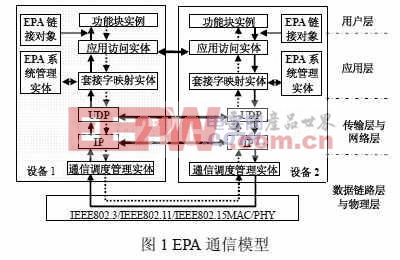
- EPA通信協議在μC/OS-II嵌入式系統中的設計與實現,本文提出了一種基于μC/OS-II嵌入式系統的EPA通信協議的實現方案。簡要介紹了EPA通信協議和模型,針對在以μC/OS-II嵌入式系統為平臺實現EPA設備通信的需求,提出了設計思路及其構建方法,并在實驗系統上得到應用。
- 關鍵字:
系統 設計 實現 嵌入式 C/OS-II 通信 協議 EPA 通信協議
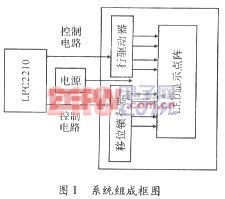
- 摘要: 當LED顯示器采用8位/16位微處理器時,存在運行速度慢、尋址能力弱和功耗大等問題。文中采用32位ARM7微處理器LPC2210為核心控制器件,完成LED顯示屏控制系統的設計。系統采用可擴展、模塊化設計。以LED顯示屏
- 關鍵字:
控制系統 設計 顯示屏 LED LPC2210 基于 LED
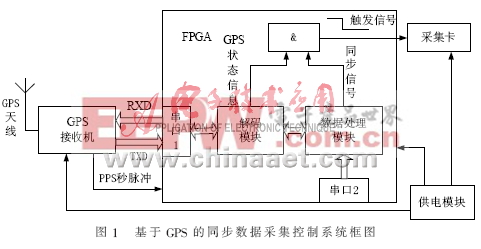
- 提出了基于GPS授時的同步數據采集系統改進方法。該方法預置采集開始時刻,利用GPS授時檢測所產生的觸發信號,用于同步各異地分布的數據采集裝置。理論分析和仿真實驗結果表明,上述方法可以達到微秒級的時間同步。
- 關鍵字:
方法 及其 實現 同步 改進 GPS 異地 數據采集 基于 通信協議
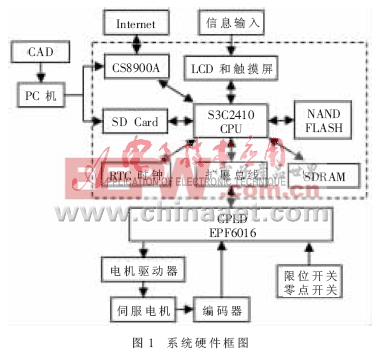
- 基于ARM和CPLD的開放式數控系統設計,針對新一代開放式數控系統的特征要求,提出一種基于ARM和CPLD、以Windows CE為操作系統的開放式數控系統方案。介紹了系統的軟硬件平臺開發,重點討論了系統核心部分中斷控制的實現方案,包括Windows CE系統中斷服務、應用程序中斷響應和CPLD程序。
- 關鍵字:
數控系統 設計 開放式 CPLD ARM 基于 通信協議
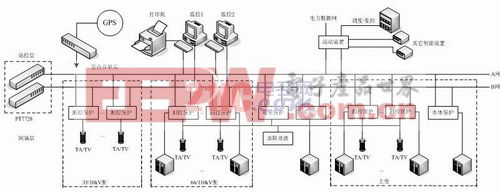
- 網絡系統是大型數字化變電站自動化系統的命脈。工業以太網為傳統的工業總線互聯系統提供了異構系統互聯以及推動信息化帶動自動化的新選擇、新方向、新技術。在變電站互聯應用方面,MOXA能夠大幅度的促進和提升電力能源管理效率與安全運行。
- 關鍵字:
數字化 變電站 大型 架構 MOXA 以太網 基于 通信協議
- 基于QT/Embedded的可變情報板應用程序開發,本文以可變情報板圖形系統的開發為例,闡述了基于QT的應用軟件開發方法,其友好的人機交互界面以及反應快速靈敏的特點,使得該系統具有良好的執行效果。目前,該系統已經成功交付使用并具有良好的穩定性。隨著嵌入式技術的繼續飛速發展和用戶需求的不斷增加,相信在未來不久,LED可變情報板系統將會發揮越來越多的作用。
- 關鍵字:
應用 程序開發 情報 可變 QT/Embedded 基于 通信協議

- 面向嵌入系統的480Mb/s無線UWB鏈路,任何設備都可啟動通信通道,連接網絡中另一設備。連接嵌入系統常常需要建立一個網絡。在該網絡中,所有成員享有相同的權利,并可以任何方向在設備間傳輸數據。本文討論的架構中便容許建立一個實現雙向數據傳輸的媒體訪問層。
- 關鍵字:
UWB 鏈路 無線 480Mb/s 嵌入 系統 面向 通信協議
- 隨著通信系統的干擾特點發生變化,測試設備也在變化。模擬電路以前實現的功能,現在可以以數字方式實現,測量速度不斷提高,我們可以更快地獲得測量結果。泰克公司推出的實時頻譜分析儀可以即時查看非常寬的頻譜跨度,而不會丟失頻段中的信息,從而可以發現、捕獲并測量對傳統技術極具挑戰性的瞬態峰值。
- 關鍵字:
診斷 應用 EMI 分析 頻譜 實時 通信協議

- 智能輪式移動機器人嵌入式控制系統設計,為了優化智能輪式移動機器人的控制系統,提出了一種基于ARM微處理器和復雜可編程邏輯器件(CPLD)的嵌入式控制系統。硬件部分采用以ARM和CPLD為核心的模塊化設計,軟件部分采用實時操作系統μC/OS?鄄Ⅱ,并設計了電機速度調節的控制算法。實現了對機器人驅動電機、超聲傳感等任務模塊的系統控制。仿真和運行實驗結果表明,系統運行穩定,控制靈活,達到預期的設計目標。
- 關鍵字:
控制系統 設計 嵌入式 機器人 輪式 移動 智能 數字信號
通信協議:控制系統介紹
您好,目前還沒有人創建詞條通信協議:控制系統!
歡迎您創建該詞條,闡述對通信協議:控制系統的理解,并與今后在此搜索通信協議:控制系統的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473