基于SMP 運動控制內核的機器人控制系統

1 引言
隨著現代工業的迅速發展, 普通的人工勞動力已經不適合強度高、環境惡劣的工作要求。而隨著機器人制造水平的提高, 具有高效率、質量穩定、通用性強的機器人已經受到越來越多的青睞, 并被廣泛應用到柔性制造生產線上。目前, 工業生產中的搬運、焊接、噴涂等繁重工作已經逐漸被機器人所取代, 此外, 特種機器人在深海探測、消防救災等領域也得到應用[1]。早在20 世紀70 年代, 國外一些工業發達國家的機器人就進入了實用化的階段。經過30 多年的研究應用與改進, 目前無論在技術水平方面還是裝備數量上, 以日本和德國為代表的少數幾個工業發達國家都具有絕對的優勢[1]。如瑞典的ABB、日本的川崎重工、德國的KUKA等。我國“863” 計劃已經將機器人的研究列入其中,開發具有良好穩定性和實用性的機器人也得到了企業的廣泛重視。本文主要介紹一種基于SMP 純軟件運動控制內核的機器人控制系統以及它在焊接方面的實際應用。
2 系統總體結構
SMP 系統是美國Soft ServoSystem 公司研發的基于PC 的純軟件運動控制內核。SMP 軟件運行在裝有Ardence's RTX 的Windows 系統下, 通過主計算機的CPU 運行實時運動引擎, 具有閉環反饋、多軸插補、運動程序處理和PLC 邏輯運算功能。可搭配VersioBus 光纖、Panasonic RTEX、Yaskawa MECHATROLINK、Mitsubishi SSCNET 和FXI-40等多種伺服通訊網絡[2]。本機器人控制系統選用FPA-200適配卡與松下A4N 系列伺服系統構建系統的通訊平臺。
2.1 系統整體結構
SMP 系統運行環境為Windows2000 /XP, 硬件上使用普通PC 或者性能更加穩定的IPC, 高速的CPU 內核承擔純軟件方式的運動插補和PLC 運算, 并通過標準的PCI 插槽與FPA-200 建立總線通信, 經由FPA-200 適配卡上面的網絡接口和光纖接口直接與A4N 伺服驅動及I /O 進行連接。利用CPU 進行純軟件運算, 節省了獨立的運動控制卡和PLC 設備, 有效地降低了硬件成本。通過FPA-200 的光纖接口, 可進一步擴展I /O 模塊, 增加外圍設備輔助功能。整體結構圖如圖1 所示。

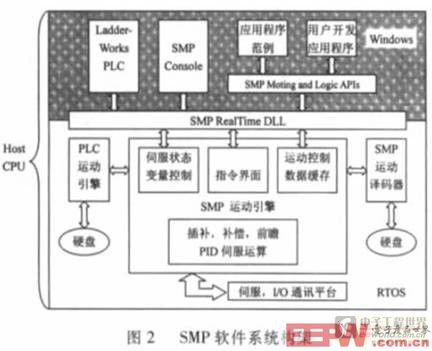
2.2 SMP 軟件結構
SMP 軟件的底層模塊包含三個可升級的實時引擎:PLC 引擎、SMP 引擎和SMP 運動解析器, 三個引擎相互循環配合完成運動控制的運算。CPU 給予底層模塊最高優先級待遇。SMP 的上層模塊則用于執行SMP 控制器, 如程序的加載、參數的設定、文件的管理和用戶界面的運行。利用Ardence RTX 對Windows 進行實時性擴展, SMP Real-Time DLL 中間鏈接層使上層模塊的應用程序可實時調用和讀取底層模塊的運動引擎數據和系統狀態信息[2]。











評論