通信協(xié)議:控制系統(tǒng) 文章 最新資訊
模糊控制在基于CAN總線的數(shù)據(jù)采集與控制系統(tǒng)中的應(yīng)用
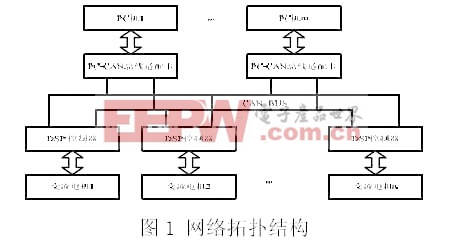
- 介紹了如何把模糊控制算法與CAN總線結(jié)合起來應(yīng)用于控制系統(tǒng);并設(shè)計了一種智能型模糊控制算法,給出了系統(tǒng)的整體結(jié)構(gòu)和現(xiàn)場模糊控制單元的硬件實現(xiàn)電路及其軟件設(shè)計思路。系統(tǒng)的仿真結(jié)果表明,該系統(tǒng)實時性好、控制精度較高。
- 關(guān)鍵字: 數(shù)據(jù)采集 控制系統(tǒng) 應(yīng)用 總線 CAN 控制 基于 模糊 CAN
工業(yè)控制系統(tǒng)的網(wǎng)絡(luò)化發(fā)展及現(xiàn)狀研究
- 關(guān)鍵字: 控制系統(tǒng) 信息網(wǎng)絡(luò) DCS FCS 以太網(wǎng)
基于可編程控制器(PLC)的噴膠控制系統(tǒng)設(shè)計
- 關(guān)鍵字: 噴膠 可編程控制器 控制系統(tǒng) 熱熔膠
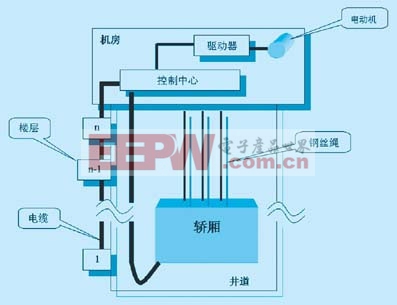
基于西門子PLC的電梯控制系統(tǒng)
- 1 引言
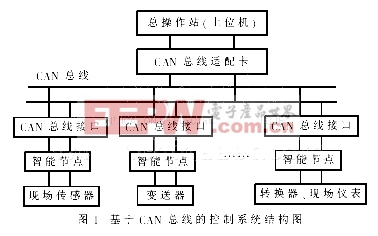
在常規(guī)自動控制系統(tǒng)中,傳感器與執(zhí)行器是獨立接線的,多個傳感器和執(zhí)行器構(gòu)成的系統(tǒng)需要大量導(dǎo)線。通信總線應(yīng)用到測控系統(tǒng)中,不僅能節(jié)省大量的導(dǎo)線,而且可提高系統(tǒng)的可靠性。已被廣泛采用的 - 關(guān)鍵字: 控制系統(tǒng) 電梯 PLC 西門子 基于
控制系統(tǒng)的網(wǎng)絡(luò)化發(fā)展及現(xiàn)狀
- 0 引言 隨著計算機技術(shù)、通信技術(shù)和控制技術(shù)的發(fā)展,傳統(tǒng)的控制領(lǐng)域正經(jīng)歷著一場前所未有的變革,開始向網(wǎng)絡(luò)化方向發(fā)展。控制系統(tǒng)的結(jié)構(gòu)從最初的CCS(計算機集中控制系統(tǒng)),到第二代的DCS(分散控制系統(tǒng)),發(fā)展
- 關(guān)鍵字: 現(xiàn)狀 發(fā)展 網(wǎng)絡(luò)化 控制系統(tǒng)
基于IC74191的自動進給控制系統(tǒng)的設(shè)計與實現(xiàn)
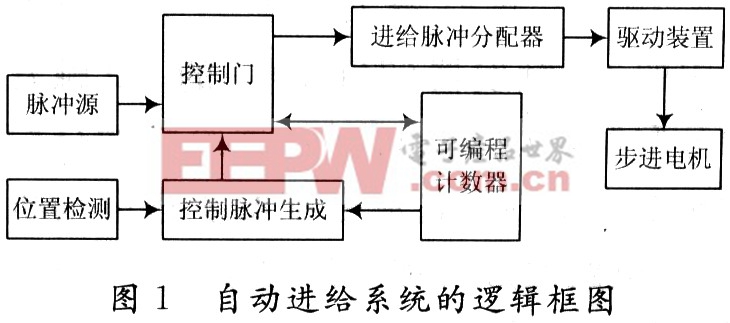
- 自動進給控制系統(tǒng)是數(shù)控機床等現(xiàn)代加工設(shè)備的重要組成部分,以中規(guī)模數(shù)字集成計數(shù)器IC74191為核心,利用EDA軟件對數(shù)控機床自動進給系統(tǒng)研究和設(shè)計,給出自動進給控制系統(tǒng)的控制電路,分析了控制信號的傳輸方式和過程;利用虛擬邏輯分析對數(shù)控機床自動進給系統(tǒng)進行了仿真實驗,結(jié)果完全符合設(shè)計要求。
- 關(guān)鍵字: 設(shè)計 實現(xiàn) 控制系統(tǒng) 自動 IC74191 基于 轉(zhuǎn)換器
基于PLC的噴膠控制系統(tǒng)設(shè)計
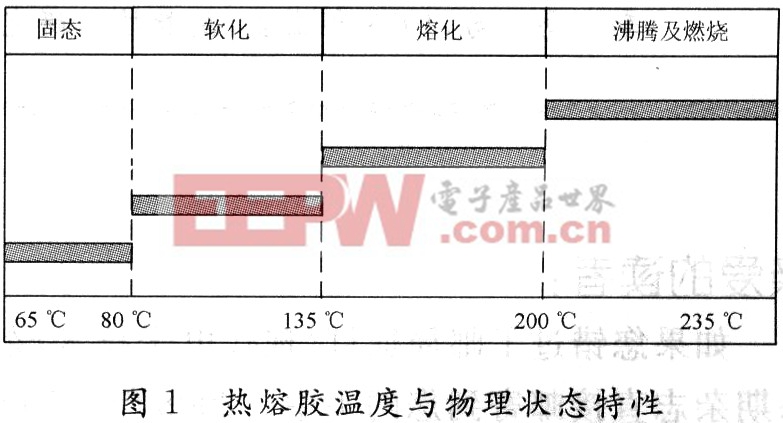
- 根據(jù)紙箱粘箱中對噴膠精度和速度的要求以及熱熔膠的溫度特性,利用PLC替代傳統(tǒng)的繼電器接觸器控制系統(tǒng),設(shè)計一種基于三菱FXIN-40MR的適用于紙箱封箱的PLC控制噴膠系統(tǒng),給出系統(tǒng)的構(gòu)成及控制的實現(xiàn)方法。在分析影響噴膠速度與精度控制因素的基礎(chǔ)上,利用最小二乘法消除因噴膠頭控制電磁閥滯后開閉對噴膠準確度的影響,使系統(tǒng)可實現(xiàn)單個紙箱多個方位的同時精確噴膠。
- 關(guān)鍵字: 設(shè)計 控制系統(tǒng) PLC 基于 轉(zhuǎn)換器
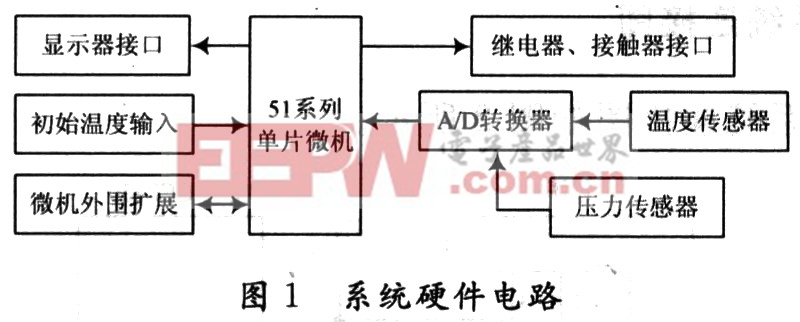
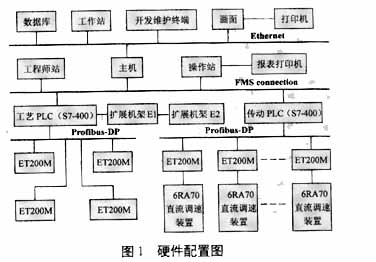
基于S7-300 PLC的大型電弧爐控制系統(tǒng)
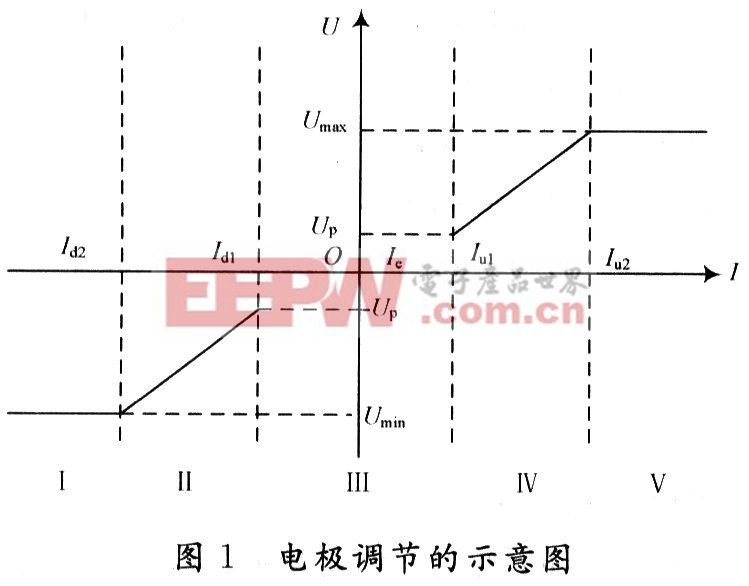
- 針對電弧爐的非線性、大滯后、強耦合、時變及隨機干擾較強的特點,應(yīng)用自適應(yīng)控制理論,采用可編程邏輯控制器(PLC)為核心控制部件,實現(xiàn)電弧爐電極升降的自動準確控制,有效減少電極短路、斷弧和振蕩現(xiàn)象。在此給出控制方案、系統(tǒng)主要硬件及軟件流程圖。該系統(tǒng)已可靠運行于某煉鋼廠,并實現(xiàn)了降低電爐電耗,提高產(chǎn)品質(zhì)量的目的。
- 關(guān)鍵字: 控制系統(tǒng) 大型 PLC S7-300 基于 轉(zhuǎn)換器
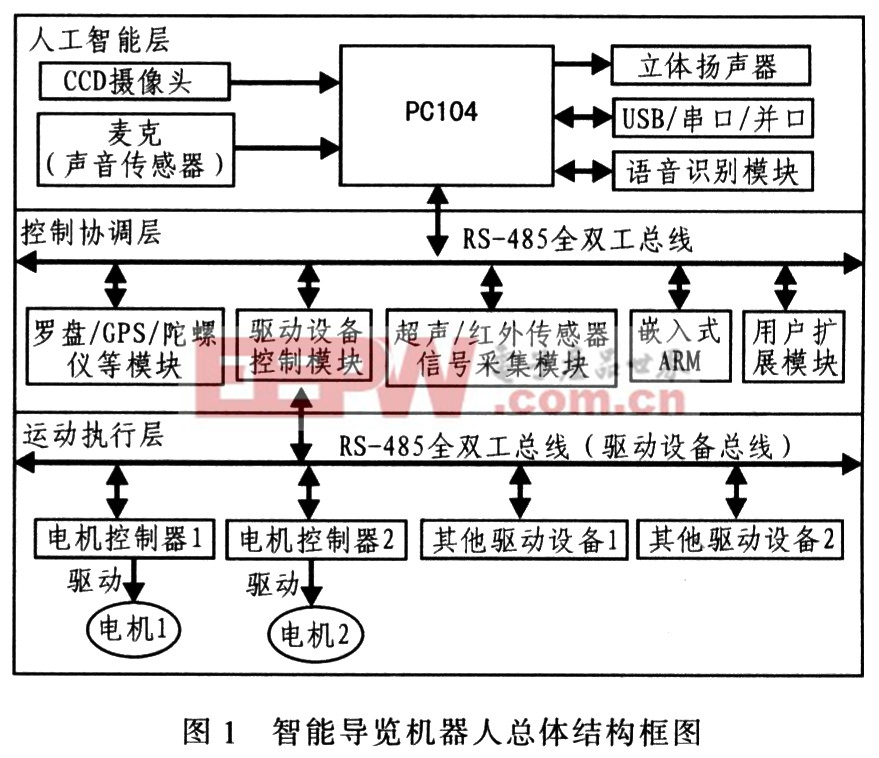
基于激光雷達避障的機器人控制系統(tǒng)設(shè)計
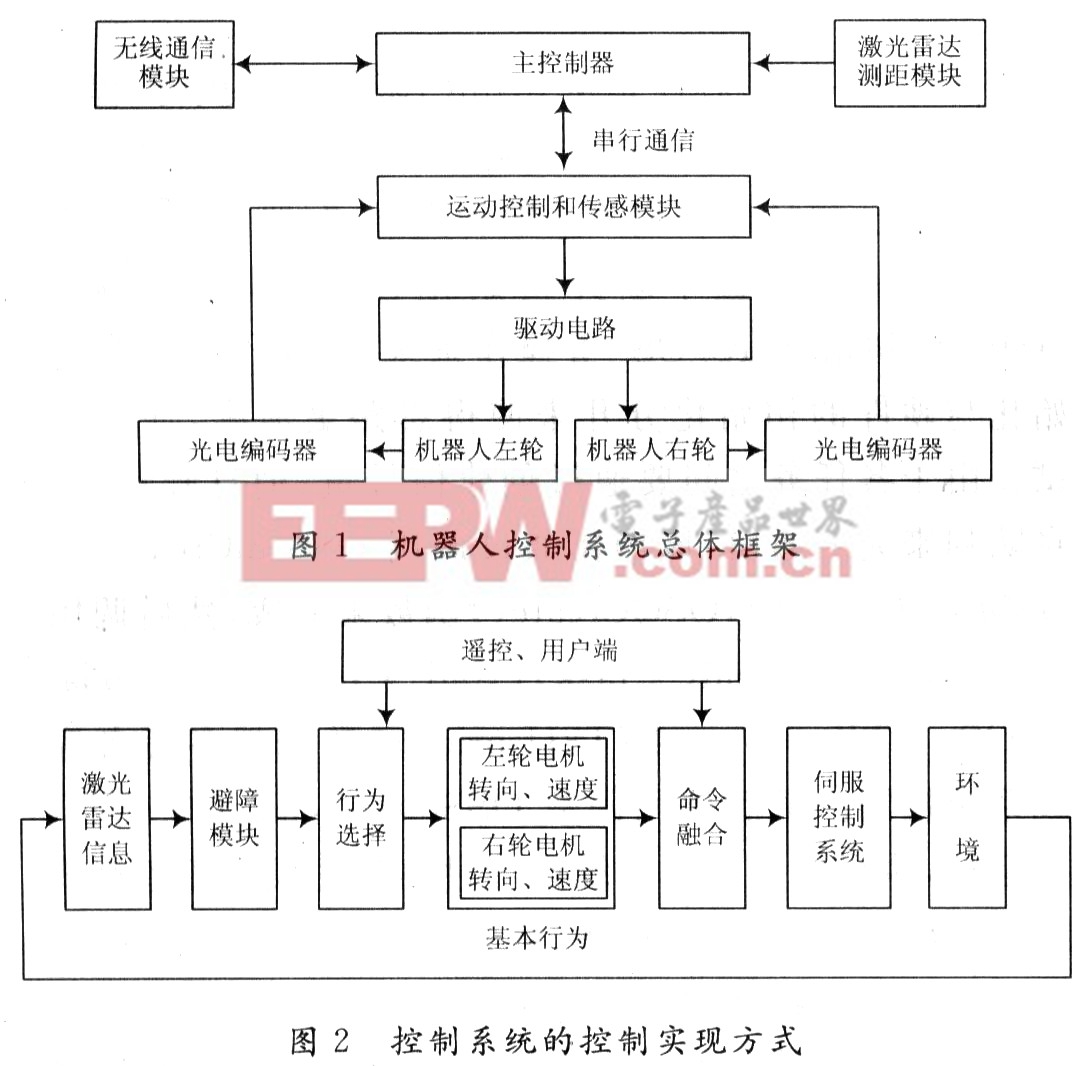
- 根據(jù)激光雷達跟蹤測量定位理論,介紹一種基于μC/OS-Ⅱ的實時機器人控制系統(tǒng)。該控制系統(tǒng)采用分層分布式控制系統(tǒng)設(shè)計方案,主控制模塊以S3C44BO為硬件平臺,并以μC/OS-Ⅱ為軟件平臺,通過多任務(wù)劃分,將整個系統(tǒng)功能分成多個按不同優(yōu)先級的調(diào)度任務(wù),以實現(xiàn)機器人不同功能的需求。伺服控制模塊以TMS320F2812為控制器,并以PID為控制決策算法。性能測試表明,該控制系統(tǒng)控制精度高,穩(wěn)定性好,系統(tǒng)響應(yīng)迅速。
- 關(guān)鍵字: 控制系統(tǒng) 設(shè)計 機器人 雷達 激光 基于 轉(zhuǎn)換器
通信協(xié)議:控制系統(tǒng)介紹
您好,目前還沒有人創(chuàng)建詞條通信協(xié)議:控制系統(tǒng)!
歡迎您創(chuàng)建該詞條,闡述對通信協(xié)議:控制系統(tǒng)的理解,并與今后在此搜索通信協(xié)議:控制系統(tǒng)的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對通信協(xié)議:控制系統(tǒng)的理解,并與今后在此搜索通信協(xié)議:控制系統(tǒng)的朋友們分享。 創(chuàng)建詞條
通信協(xié)議:控制系統(tǒng)電路
通信協(xié)議:控制系統(tǒng)相關(guān)帖子
通信協(xié)議:控制系統(tǒng)資料下載
通信協(xié)議:控制系統(tǒng)專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司