離散PID控制算法如下:
本文引用地址:http://www.104case.com/article/95275.htm
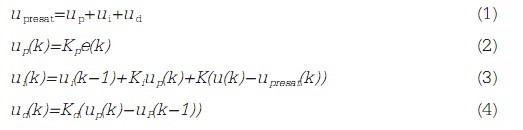
式中,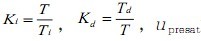 為飽和前的輸出,KP為PID控制的比例增益,Ti為PID控制的積分時間常數,Td為PID控制的微分時間常數,Kc為退飽和時間常數。
為飽和前的輸出,KP為PID控制的比例增益,Ti為PID控制的積分時間常數,Td為PID控制的微分時間常數,Kc為退飽和時間常數。
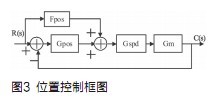
位置控制器的控制算法
位置控制器采用比例加前饋控制結構,如圖3所示,其中Gm為電機的傳遞函數,Gspd為速度環的傳遞函數,Gpos為位置環的傳遞函數,Fpos為位置前饋控制器傳遞函數。
系統的傳遞函數為:

pid控制器相關文章:pid控制器原理












評論