監控芯片因電源問題引起異常復位的處理辦法

在單片機系統設計中,對系統的EMI、信號完整性、時序設計都能引起足夠的重視;但對于電源完整性引起的地彈和電源反彈的問題,很多設計者還是認識得不清晰。在單片機系統設計中,有時由于芯片自身缺陷或芯片之間接口驅動配合不當引起的系統不穩定,甚至不能工作的情況非常多。下面通過對微處理器監控芯片MAX818在使用中出現異常復位的實例分析,說明由于電源完整性引起的系統工作不穩定現象。
本文引用地址:http://www.104case.com/article/78797.htm1 系統描述
圖1為μP監控電路。監控芯片MAX818具有電源低壓監視、電池管理、RAM片選鎖定及微處理器硬件看門狗功能。電源低壓監視是當系統電壓低于芯片設定電壓時,MAX818發出復位信號。電池管理是當VCC高于電池VBATT時,OUT切換到VCC,電池處于浮充狀態;當VCC低于VBATT時,OUT切換到VBATT,由電池供電。RAM片選鎖定用于上電或掉電時保護RAM中的數據不丟失且正確讀寫。微處理器硬件看門狗的作用是當程序跑飛,喂狗信號WDI得不到服務時,芯片發出復位信號,復位系統。WDI信號懸空時,MAX818自動發出復位信號的功能禁止。
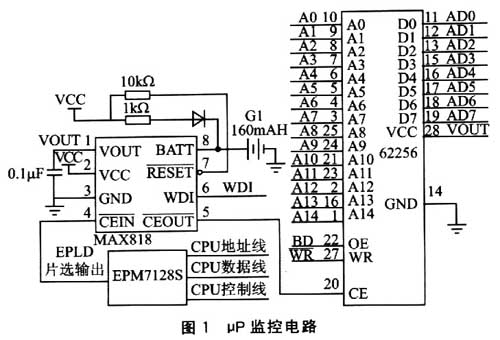
系統RAM片選信號由CPU的地址線,控制線經EPLD譯碼后輸出接到MAX818的CEIN,經MAX818輸出腳CEOUT接到RAM片選CE上。RAM的供電電源由MAX818的OUT輸出引腳提供。
2 系統異常復位現象及分析解決
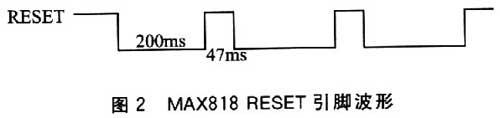
在單片機系統調試過程中,將監控芯片MAX818的看門狗清除引腳WDI懸空,使MAX818的復位功能禁止,且程序處于仿真狀態,這時系統軟硬件一切功能正常。仿真調試完畢,將程序寫入Flash中讓其運行,系統總是不停地復位、重啟。MAX818的復位腳不停地發出復位信號,用示波器觀察的波形如圖2所示。
將WDI懸空重新仿真,系統正常;將WDI懸空,寫入Flash,系統正常。分析認為是MAX818自己在發出復位信號。理論上能引起MAX818復位的原因有以下2點:
①超過1.6s,MAX818引腳(6)WDI沒有喂狗信號,能引起復位;
②系統電源低于MAX818電源電壓設定值4.65V,能引起復位。
通過仿真監測CPU問隔ls清狗一次;測量系統電源電壓VCC=5.08V。說明不是上面兩條原因引起的復位,而是有別的什么原因引起異常復位。下面分析引起復位的原因:
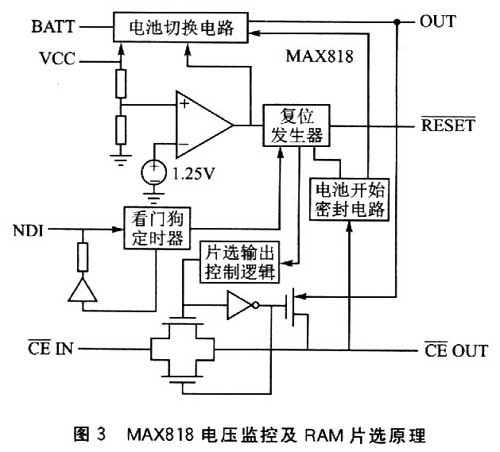
芯片電源監視原理如圖3所示。電源監視原理為系統VCC通過電阻分壓后輸入比較器的正端(十),比較器的負端(一)接內部基準1.25V。當比較器的+端電壓低于1.25V時,比較器輸出換轉。一邊使RESET輸出低電平復位系統,同時將OUT切換到BATT電池。推測認為,是芯片的CEI和CEO引腳狀態快速切換引起芯片內部局部電源電壓下降,經內部分壓后低于l.25V電源監視功能起的作用,發出復位信號使系統不停復位。根據推測,為使MAX818電源監視不異常復位,必須使芯片內部比較器的+端電壓高于1.25V。為驗證推測,將芯片電源VCC電壓提高到5.3 V以上,這時系統開始正常工作。
將芯片電源VCC恢復到正常5.08 V,在MAX818的CEI輸入引腳串入500Ω電阻,以降低CEI和CEO引腳狀態切換速率,這時系統也能正常工作。
3 引起電源完整性原因
①在數字電路中,當器件處于上升/下降沿很陡的截止和導通轉換的過程時,會產生很大的瞬間變化的電流△I。由于電源線和地線都存在引線電感L,△I通過L將引起地電位的波動和電源電壓的波動,從而引起噪聲,所以也稱為△i噪聲。如果是由于封裝電感而引起地平面的波動,造成芯片地和系統地不一致,這種現象就稱為“地彈(ground bounce)”;同樣,如果是由于封裝電感引起的芯片和系統電源差異,就稱為“電源反彈(power bounce)”。電壓的瞬變由下面的公式定義:
V=L·di/dt
其中:L是電流傳輸路徑上電感的值;出表示信號上升時間間隔內電流的變化;出表示電流的傳輸時間(信號的上升時間)。
芯片的內部電源引線、地線引線或印制板的布線問題,一般容易引起電源完整性問題。
②不同芯片的接口驅動類型不當也能引起電源完整性問題。例如,用輸出小電流的I/O引腳去驅動需要大驅動電流的引腳,容易導致輸出電流的芯片局部電源電壓波動,引起系統工作不正常。
結語
通過一個具體實例論述電源完整性問題,說明單片機系統中,許多認為莫名其妙的現象很多時候是由于電源完整性余量不夠引起的。在加強系統的EMC設計和時序設計的同時,還要對電源完整性給予足夠的關注。









評論