LEON3開源軟核處理器動態圖像邊緣檢測SoC設計

①系統時鐘與復位信號:是整個LEON3架構所共用的時鐘信號和復位信號,而iCLK_50是由外部直接引入的頻率為50MHz的時鐘,未經過PLL處理。
本文引用地址:http://www.104case.com/article/273874.htm②IP核控制信號:主要實現IP核的觸發功能和結束功能。
③APB總線的輸入信號和輸出信號:此信號主要用于APB總線控制、IP核選擇、IP核使能等,其中包括對IP核內部寄存器的設置都是通過APB總線信號來完成的。
④D5M攝像頭輸入信號和輸出信號:此信號主要完成對D5M攝像頭的配置以及數據采集。
⑤LTM顯示器輸入信號和輸出信號:此信號用于對LTM顯示器的配置。由于基于APB總線的IP核集成D5M攝像頭、LTM顯示器和邊緣檢測算法于一體,所以外部接口信號相對較多。但就APB總線本身而言,其信號并不多,這也是基于APB總線的設計方法相對簡單的原因。
3.3自定義IP核的結構設計
有關“基于APB外圍低速總線圖像檢測IP核的實現基本思想部分”略——編者注。
基于APB總線的IP核框架結構如圖5所示。
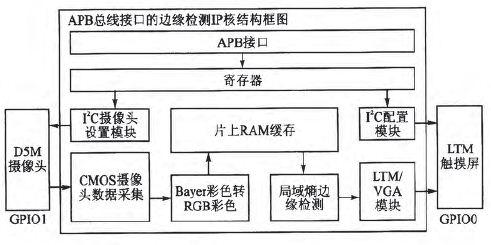
圖5用戶定義圖像邊緣檢測lP核結構
4實驗結果
4.1動態圖像邊緣檢測算法硬件實現仿真與分析
文中首先利用Matlab驗證局域熵邊緣檢測算法設計的正確性,然后采用Verilog HDL硬件描述語言編寫圖像邊緣檢測算法,在算法實現過程中,為提高算法的性能,采用了Quartus II中自帶的DSP加速宏模塊。同時,為驗證仿真算法的正確性,編寫Testbench系統測試文件,對其進行仿真驗證,圖6為局域熵邊緣檢測算法的硬件仿真時序圖。
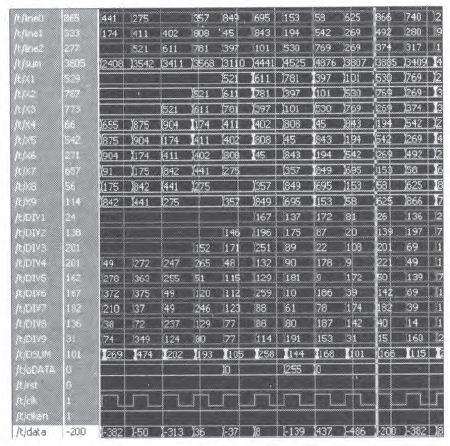
圖6局域熵邊緣檢測算法硬件實現仿真時序圖
從圖6中,可以看到3×3窗口產生的過程,L1~L3為采用片上緩存的方法實現的三行數據的同步。X1~X9對應3×3窗口中的9個像素點。圖中最終的數據輸出是有一定時延的,這是由于算法中存在大量的乘加運算和浮點數運算造成的。
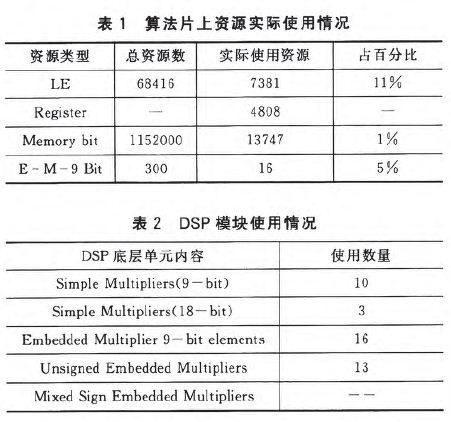
在實現算法的同時,考慮到所選芯片提供了可用于加速算術運算的DSP模塊,于是為了加速算法的處理速度,在算法實現過程中,加入了大量的DSP加速處理模塊,如乘加器,浮點除法器等。表1給出了用硬件語言實現上述算法所使用的芯片資源情況。表2給出了該算法對DSP加速模塊的使用情況。










評論