基于PSoC?4的矢量控制方案 :電流采樣

原理圖設(shè)計(jì)
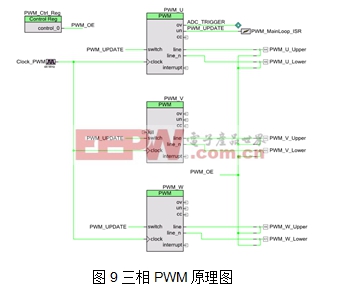
本文引用地址:http://www.104case.com/article/247805.htm首先,我們使用TCPWM模塊來實(shí)現(xiàn)SVPWM。如圖9所示,從PSoC Creator中拖放三個(gè)TCPWM模塊,配置TCPWM的工作模式為中央對齊,帶死區(qū)的雙路互補(bǔ)輸出模式。三對PWM輸出可分別作為U、V和W相橋臂驅(qū)動(dòng)信號。同時(shí)在任一TCPWM模塊的UN事件輸出(下溢信號,用來指示計(jì)數(shù)器向下計(jì)數(shù)達(dá)到“0”)觸發(fā)PWM中斷,用于進(jìn)行FOC計(jì)算并更新占空比。
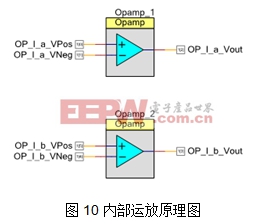
我們采用芯片內(nèi)部運(yùn)算放大器進(jìn)行信號放大。PSoC4內(nèi)部的運(yùn)放是一個(gè)高度可配置的運(yùn)算放大器,可配置其速度,功耗,驅(qū)動(dòng)能力和補(bǔ)償。也可配置成比較器進(jìn)行使用。運(yùn)放增益帶寬可達(dá)4MHz(容性負(fù)載為20pF時(shí)),可實(shí)現(xiàn)軌到軌的輸入輸出動(dòng)態(tài)范圍。圖10顯示了內(nèi)部運(yùn)放的原理圖,電路形式采用差分放大形式,相關(guān)阻容在芯片外部。
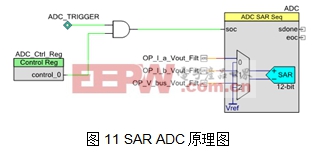
PSoC® 4包含了一個(gè)12位的逐次逼近型模數(shù)轉(zhuǎn)換器(SAR ADC)模塊,其可滿足中等分辨率、快速轉(zhuǎn)換的應(yīng)用需求。能夠?qū)崿F(xiàn)最高1Msps的單通道采樣,支持零開銷通道切換功能。SAR ADC具有8個(gè)可配置通道和1個(gè)插入通道,可靈活的通過軟件、定時(shí)器、管腳或來自UDB的信號觸發(fā),支持單次、周期或連續(xù)模式采樣。圖11展示了SAR ADC原理圖,可采集UV兩相電流及母線電壓。
程序設(shè)計(jì)
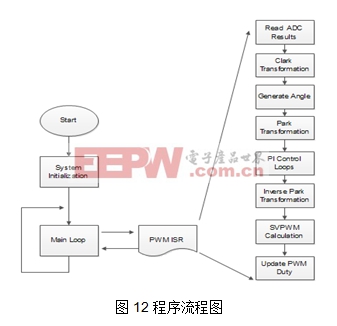
主控程序首先會初始化和配置PSoC®4的內(nèi)部資源,然后進(jìn)入主循環(huán)。主循環(huán)主要檢測用戶的起停命令和速度給定,決定電機(jī)的運(yùn)動(dòng)狀態(tài);并完成一定的調(diào)試輸出功能。FOC主算法全部在PWM中斷中完成,主要完成讀取ADC采樣結(jié)果,完成坐標(biāo)變換,PID控制,SVPWM輸出及更新占空比等操作。具體流程圖如圖12所示。
電流傳感器相關(guān)文章:電流傳感器原理









評論