研究人員開發出高精度GPS系統

馬德里卡洛斯三世大學(Universidad Carlos III de Madrid)的研究人員近日開發出一款汽車GPS導航系統,這款導航系統比之普通的GPS,在對車輛定位性能方面要高出90%,并且其成本低廉,可安裝在任何車輛中。這項技術應用前景廣泛,今后將能夠實現包括:合作駕駛、自動避開行人、碰撞警告等功能。
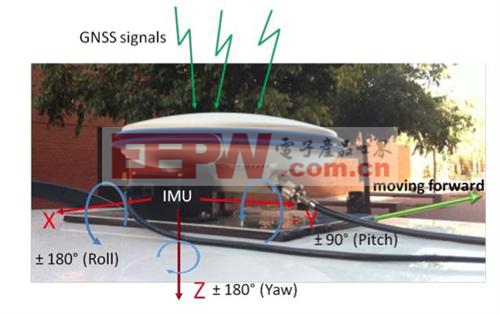
該系統將GPS(或GNSS,全球導航衛星系統)與三個加速計和三個陀螺儀組成的慣性測量單元(IMU,Inertial Measurement Unit)進行整合,在繁雜的城市交通環境下利用卡爾曼濾波(Unscented Kalman filter)檢測出物體的位置、速度。該整合型導航系統由應用人工智能組(Applied Artificial Intelligence Group)以及系統智能實驗室(Systems Intelligence Laboratory)聯合開發。
研究人員稱,目前該系統在危機情況下對車輛定位的準確率高達90%,但會稍有浮動,這取決于天氣及空氣中各種電磁波的干擾強度。
目前商業化的GPS導航儀,在空曠地帶,接收器從衛星接受到的車輛位置數據與實際位置偏差大約為15米,而在城市繁雜路況中,定位誤差則上升到了50米,這是由于信號反彈時被建筑物、樹木、狹窄街道等阻擋。
因此,目前汽車使用的GPS導航儀最大的弊端就是在特殊情況下的信號損失。當車輛駛入隧道中,導航接收器無法收到衛星信號,這時智能交通系統則無法發揮保護行人安全的作用。
目前能夠勉強解決這個問題的方法就是利用城市地圖對車輛作出大致定位,雖然誤差較大,但至少能夠使通訊保持連接狀態。
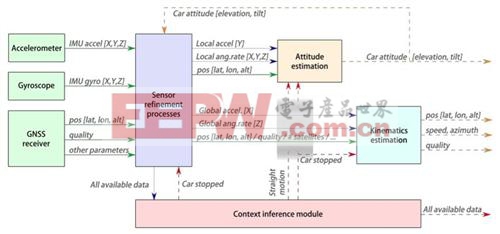
系統結構:通常情況下,左側傳感器中的數據傳遞至右側傳感器信息細化處理模塊(紫色)。大量數據會儲存于該模塊中并進行前后信息對比,該模塊能夠訪問系統中的所有組件信息,得出的評估結果將傳輸至右側評估單元(淡黃色),該單元做出評估后將結果反饋給左側傳感器信息細化處理模塊。
圖中的箭頭代表數據傳輸的過程,實線代表由傳感器捕獲的原始數據,藍色虛線代表經過處理的數據(原始數據經過補償處理并優化)。其他虛線代表這些數據通過過濾器或其它算法經過加工所得。
該軟件利用搜集到的數據進行前后多時刻的對比,再輔以強大的算法,消除由GPS接收機接收衛星信號時的信號損失及瞬時偏差。
目前,研究人員已經開發出一款原型系統,能夠安裝在任何車輛中。他們的目標是獲取盡可能多的路況及位置信息并將它們進行交互,并使之為人們所用。為了達到這一目的,研究人員采用一臺光學相機,紅外線及激光以檢測是否有行人正在車前穿過馬路,甚至能夠檢測駕駛者的嗜睡情況。
他們下一步的計劃是將該系統整合入智能手機中,由于智能手機基本都配備了10個以上的傳感器,比如加速計、陀螺儀、磁力計、GPS、攝像頭、藍牙等,那么植入該系統將變得更容易。









評論