CAN總線在汽車電子的應用與實現

在應用/系統編程電路:
IAP/ISP技術在許多款高性能單片機得到應用,其突出特點是方便快捷的實現程序的下載和更新。P89C668的FLASH空間0XFC00~0XFFFF燒寫入1K字節的BootRom程序,上電后可以通過軟件和硬件置位方法進入BootRom程序,通過PHILIPS提供的編程軟件由串行口通訊就可以實現程序的在線升級(ISP)。當然用戶還可以根據需要依據協議,自己編寫BootRom程序(IAP)。通過撥碼開關硬件置位(ALE,,,P2.6,P2.7),上電后強制進入BootRom程序,燒寫程序完畢后撥回原來狀態重新上電后就進入用戶程序。串行口電平轉換芯片用MAX202替代MAX232,其匹配電容只需103瓷片電容。串行數據通訊波特率可達38400bps。
晶振和復位電路:
外接一塊工業級的12M振蕩芯片作為時鐘信號。復位電路采用X25045芯片進行智能控制。X25045芯片將看門狗定時器,電源監控電路和E2PROM功能合三為一。看門狗定時器功能在系統出錯期間,經過一個可設置的時間間隔就置位RESET信號。電源監控電路能檢測到欠電壓狀況,在VCC下降到限閥值以下,系統被復位。并且RESET信號在VCC恢復且穩定之前一直有效。存儲器功能的X25405是CMOS的4096字的E2PROM.并且支持SPI協議的三線(SO,SI,SCLK)存取。本節點用到X25405的前兩個功能構成可靠的復位電路。
開關/數字量,模擬量檢測電路:
汽車節點的開關器件(信號燈,雨刮,面板,車窗玻璃,電動后視鏡等等的開關)特別復雜和繁多,而電流檢測,水溫油位傳感器信號都是非線性的模擬信號,所以可靠實時地對這些開關/模擬量進行檢測成為汽車電子硬件必須解決的問題。傳統的分立元件保持電路存在可靠性差,尤其是開關觸點氧化嚴重,浪費大量的微處理器I/O口等問題,推薦采用MOTOROLA公司的多路開關檢測芯片MC33993。其突出優點如下:
3.3/5.0V的SPI序列讀寫(SO,SI,SCLK);
8路可編程開關輸入檢測(接地或接電源),14路接地開關輸入檢測,每路開關狀態改變均能夠產生中斷;
開關輸入電壓從-14V~Vpwr(工作電源),Vpwr最大可達40V;
開關狀態改變時的可選擇喚醒;
可選擇的濕性電流(16mA或2mA);
22對1的模擬量輸出;
Vpwr的低功耗電流(standbycurrent)小于100uA,VDD的低功耗電流(standbycurrent)小于10uA。
可見只需要四個CPU口線(SPI序列線和片選),就能夠完成22路開關量(其中有8路可編程為對接電源開關)的檢測,還可以進行串行和并行的多片MC33993級連。所謂的濕性電流(wettingcurrent),指的是MC33993內部提供的輸入口的上拉和下拉恒流源,可以編程選擇為16mA或2mA,這對于保證開關的可靠閉合,去除金屬觸點的氧化物有著良好的作用。輸入口的恒流源,可以直接驅動MOSFET以及LED。每一個輸入口都可以編程為模擬量輸出狀態,從而在AMUX引腳輸出所選輸入口的電壓。利用MC33993恒流源和模擬量輸出可以組成線性的傳感器檢測電路。ADC芯片選用AD公司生產的并行數據采樣集成芯片AD1674。它從引腳到功能都與AD574/674完全兼容,但內部增加了采樣/保持電路,采樣頻率為100kHZ,并且有全控模式和單一工作模式。其采樣精度可達0.05%,符合高速數據采集的要求。
功率器件驅動電路:
汽車車身控制系統需要驅動大功率的用電器件,比如照明信號燈,前后雨刮器電機,電動車窗,電動后視鏡等等。功率驅動器件考慮采用MOTOROLA公司的汽車專用功率器件。MC33286為汽車電氣專用智能的雙路控制驅動芯片,與傳統的機械繼電器相比,自身提供過流和過熱保護,響應時間更短,穩定性更高。MC33286設有兩路驅動通道,每路最大工作電流可達15A,通過兩路輸入端口將CPU引腳電平信號引入,經過內部的邏輯處理模塊轉換成輸出通道的電平變化。特別適合信號燈以及阻性負載的驅動。MC33887是帶反饋的H橋型驅動芯片,專用來驅動需要正反轉的電機負載。MC33486與MC33887類似,但內部只有半橋須外加CMOS管以構成全橋驅動電路,穩定輸出可達10A,尤其適用于電動車窗電機之類的大功率并伴有沖擊電流的正反相控制要求。
3軟件結構
系統的程序結構分為四個部分:CAN通訊程序(包括應用層協議的SJA1000通訊),外圍接口程序(所有檢測芯片和驅動芯片的驅動),中斷服務程序(處理開關信號以及故障報警等消息),主程序(完成系統初始化和任務調度,喂狗等)。限于篇幅,以下著重介紹CAN應用層協議。
本系統CAN通訊選用CAN2.0B協議的PeliCAN模式,通信位速率為500Kbps,采用雙驗收濾波器機制。為使用及修改方便,通訊協議中標識碼設計兼容點對點、一對多及廣播通訊模式。開關量消息通訊時各節點間采用主從結構,子節點的報文只有主節點接收(點對點模式),主節點的報文所有子節點均接收(廣播模式)。模擬量消息通訊時各節點間采用點對點模式。
標識符定義:(如圖2所示)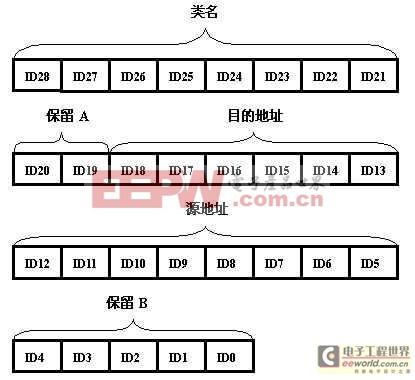
類名:00000100——應答類消息(自檢應答、故障診斷);00001000——命令類消息;00010000——調試類消息;00100000——下載類消息;01000000——工作類消息。
保留A:驗收濾波器配置預留
應答類消息中:ID19:1——自檢應答消息0——故障診斷出錯消息
ID20:驗收濾波器配置預留
工作類消息中:ID19:1——開關量消息0——模擬量消息
ID20:驗收濾波器配置預留
目的地址:接-收報文節點的地址
源地址:發送報文節點的地址,用于系統自檢。
4結束語
CAN總線以其高性能,高可靠性及獨特的設計,受到工業控制領域和汽車電子領域的廣泛重視,已被公認為最有前途的現場總線之一。我們深信不久的將來,國產的CAN總線汽車必將誕生。






評論