智能手機室內(nèi)定位系統(tǒng)面臨的挑戰(zhàn)

多年來,采用行人航位推算(PDR)技術的室內(nèi)定位系統(tǒng)受到了學術和商業(yè)領域的廣泛關注。現(xiàn)有的各種傳感器解決方案通常是使用加速度計來計算步數(shù),并使用磁力計和/或陀螺儀來測量行走方向的變化。測量準確率在行進距離[1]的0.5%到10%之間。但所有這些方法都要求用戶從始至終保持身體平衡,以確保移動感應設備的平穩(wěn),就如同行走的同時還要保持一塊蛋糕的平衡一樣,也就是所謂的“蛋糕步”。
但是智能手機的室內(nèi)定位系統(tǒng)要能夠讓用戶自由移動,且無論手機如何放置都能提供合理的結(jié)果。通過開發(fā)傳感器算法來進行室內(nèi)定位是極為復雜的,這在一定程度上是因為算法會受下列因素變化的影響,且隨著環(huán)境的實時變化,系統(tǒng)還必須同時兼顧到這些因素。
地磁異常隨處可見。定向的不確定性是造成定位出錯的主要原因。盡管使用磁力計可以避免定向過程中出現(xiàn)的“航向漂移”問題,但智能手機通常在一天中[2]60%的時間里都會出現(xiàn)地磁異常。如圖1所示,當平穩(wěn)地拿著手機經(jīng)過一根普通的電線桿時,可以看到,航向出現(xiàn)擺動,變得極不準確。而通過算法的精心設計,可以檢測到這些異常并進行彌補,使定向更加精準(如圖中藍線所示)。
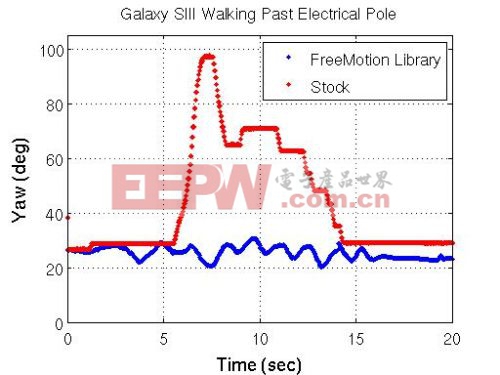
圖1.當經(jīng)過電磁干擾源(如電線桿)時,一個普通缺省設置的安卓手機的定向功能會變得很差(紅線)。在向同一臺手機植入并安裝Sensor Platforms公司的FreeMotion Library后,定向功能變得精確(藍線)。
Yaw (deg):航向偏移量(單位:度)
Time (sec):時間(單位:秒)
Galaxy SIII Walking Past Electrical Pole:Galaxy SIII經(jīng)過電線桿時的航向偏移
智能手機中的消費級慣性傳感器噪音大且不穩(wěn)定。一些學術文章中將加速度計噪音達到1mg且陀螺儀偏置漂移達到每小時20度(與軍工級傳感器相比相距甚遠)[3]的慣性測量單元(IMU)稱為低質(zhì)IMU。然而,即便智能手機中最好的傳感器,也會產(chǎn)生比該值多一到兩個數(shù)量級的噪音。因此,這種噪音累積會迅速導致嚴重的定位錯誤。在提高傳感器硬件性能之前,需要引入一些算法來減少航位推算錯誤,例如運用PDR技術來計算步數(shù)。
不同的攜帶模式需要不同的算法。PDR技術能夠通過檢測步數(shù)來減少集成錯誤。然而,僅是用手在空中簡單的搖晃手機也同樣會產(chǎn)生類似于行走的運動。這一問題在以往已經(jīng)得到解決,例如,對第一響應者來說,可以將傳感器模塊綁定在衣服或鞋子上的特定位置,這樣就可以避免該問題并提供可靠的結(jié)果[4]。
然而,這一方案并不適用于智能手機平臺。因為人們通常不會把手機放在鞋子里,當然也不會像拿蛋糕一樣小心翼翼地攜帶手機,相反,在人們行走的過程中,手機可能會放置在任何地方:口袋里、耳邊、錢包里或直接拿在手上。因此,無論手機放置在哪里,智能手機的PDR功能必須能夠跟蹤定位用戶的位置。









評論